山东大学学报 (工学版) ›› 2018, Vol. 48 ›› Issue (5): 69-76.doi: 10.6040/j.issn.1672-3961.0.2017.424
吴晨谋1( ),方志军1,*(),黄正能2
),方志军1,*(),黄正能2
Chenmou WU1(),Zhijun FANG1,*(),Jenqneng HWANG2
摘要:
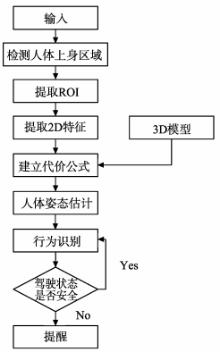
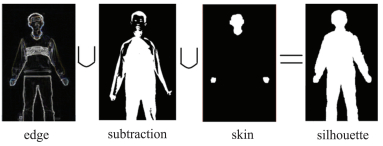
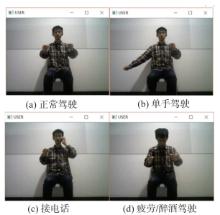
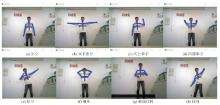
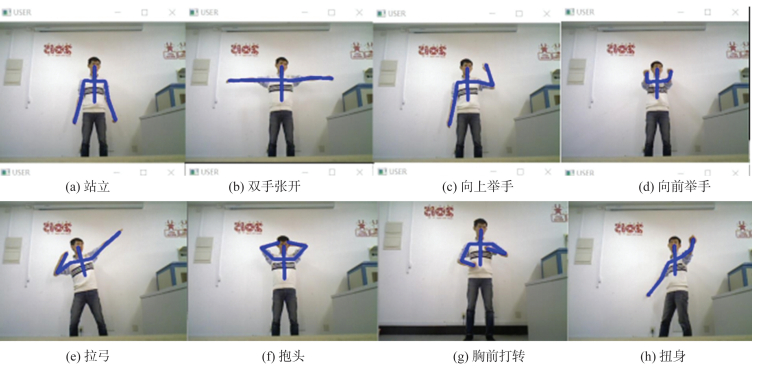
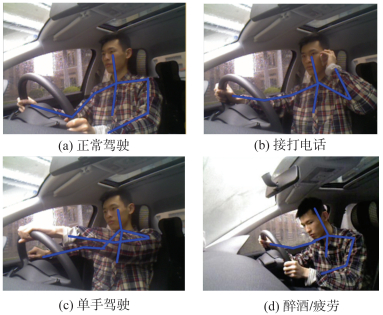
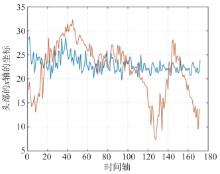
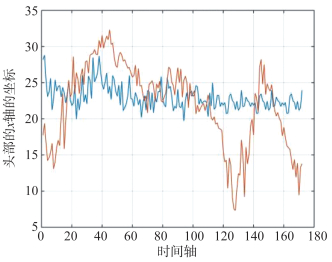
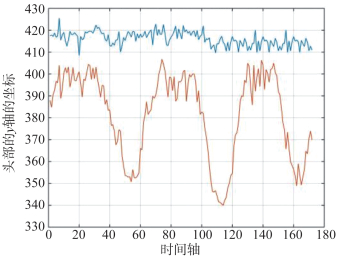
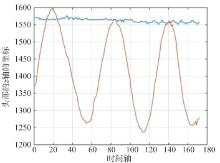
为了预防事故发生,提出一种以人体三维姿态估计对驾驶员行为进行识别监测的算法。利用单目摄像头获取运动中驾驶员的视频流,提取每帧图像的二维轮廓特征,与预先建立的三维人体模型的二维投影进行匹配,实时估计驾驶员上半身的姿态。根据获取驾驶员的8个骨骼节点的三维坐标,对驾驶员的行为识别分析。试验模拟驾驶员正常、单手、接听电话和疲劳/醉酒驾驶4种驾驶状态,通过骨骼节点的坐标变化,实现检测和识别驾驶员的姿态行为并给予提醒。在光线较好的情况下,与PRECLOSE(percent eye closure)算法相比,该算法的误检率降低了24.24%。
中图分类号:
| 1 | 国家统计局.中华人民共和国2016年国民经济和社会发展统计公报[R/OL].[2017-02-28]. http://www.stats.gov.cn/tjsj/zxfb/201702/t20170228_1467424.html. |
| 2 | NOBE S A, WANG F Y. An overview of recent developments in automated lateral and longitudinal vehicle controls[C]//Proceedings of IEEE International Conference on Systems, Man, and Cybernetics. Tucson, USA: IEEE, 2002: 3447-3452. |
| 3 | TAKEI Y, FURUKAWA Y. Estimate of driver's fatigue through steering motion[C]//Proceedings of IEEE International Conference on Systems, Man and Cybernetics. Waikoloa, USA: IEEE, 2006: 1765-1770. |
| 4 |
DAS D , ZHOU S , LEE J D . Differentiating alcohol-Induced driving behavior using steering wheel signals[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13 (3): 1355- 1368.
doi: 10.1109/TITS.2012.2188891 |
| 5 |
SIMONS R , MARTENS M , RAMAEKERS J , et al. Effects of dexamphetamine with and without alcohol on simulated driving[J]. Psychopharmacology, 2012, 222 (3): 391- 399.
doi: 10.1007/s00213-011-2549-0 |
| 6 | METS M A , KUIPERS E , LM D S D , et al. Effects of alcohol on highway driving in the STISIM driving simulator[J]. Human Psychopharmacology Clinical & Experimental, 2011, 26 (6): 434- 439. |
| 7 |
SAHAYADHAS A , SUNDARAJ K , MURUGAPPAN M . Detecting driver drowsiness based on sensors: a review[J]. Sensors, 2012, 12 (12): 16937- 16953.
doi: 10.3390/s121216937 |
| 8 | INGRE M , AKERSTEDT T , PETERS B , et al. Subjective sleepiness, simulated driving performance and blink duration: examining individual differences[J]. Journal of Sleep Research, 2010, 15 (1): 47- 53. |
| 9 | KE S R, ZHU L J, HWANG J N, et al. Real-time 3D human pose estimation from monocular view with applications to event detection and video gaming[C]//Proceedings of 2010 Seventh IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS). Boston, USA: IEEE, 2010: 489-496. |
| 10 | SUN Ruizhi.3D front-view human upper body pose estimation using single camera[D]. Seattle: University of Washington, 2013. |
| 11 | FELZENSZWALB P , MCALLESTER D , RAMANAN D . A discriminatively trained, multiscale, deformable part model[J]. Cvpr, 2008, (8): 1- 8. |
| 12 | HAN F. A two-stage approach to people and vehicle detection with HOG-based SVM[C]//Proceedings of Proc. of Workshop on Performance Metrics for Intelligent Systems. Piscataway, NJ: IEEE, 2006: 133-140. |
| 13 | VIOLA P, JONES M. Rapid object detection using a boosted cascade of simple features[C]//Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition.Kauai, Hawaii: IEEE, 2001: 511. |
| 14 | LIENHART R, MAYDT J. An extended set of Haar-like features for rapid object detection[C]//Proceedings of International Conference on Image Processing, Rochester. NY, USA: IEEE, 2002. |
| 15 | LI H, LIN Z, SHEN X, et al. A convolutional neural network cascade for face detection[C]//Proceedings of 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2015). Boston, MA, USA: IEEE, 2015: 5325-5334. |
| 16 | CHIEN Y . Pattern classification and scene analysis[J]. The Library Quarterly: Information, Community, Policy, 1974, 44 (3): 462- 463. |
| 17 | YOON I , KIM S , KIM D , et al. Adaptive defogging with color correction in the HSV color space for consumer surveillance system[J]. IEEE Transactions on Consumer Electronics, 2012, 58 (1): 606- 607. |
| 18 |
SCHWARZ M W , COWAN W B , BEATTY J C . An experimental comparison of RGB, YIQ, LAB, HSV, and opponent color models[J]. Acm Transactions on Graphics, 1987, 6 (2): 123- 158.
doi: 10.1145/31336.31338 |
| 19 | VECCHI M P , KIRKPATRICK S . Global wiring by simulated annealing[J]. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 2004, 2 (4): 215- 222. |
| 20 | TRUTSCHEL U, SIROIS B, SOMMER D, et al. PERCLOS: An alertness measure of the past[C]//Proceedings of the Sixth International Driving Symposium on Human Factors in Driver Assessment, Training and Vehicle Design. California, USA: IEEE, 2011: 172-179. |
| [1] | 史青宣,王谦,田学东. 基于层叠的部件轨迹片段模型的视频人体姿态估计[J]. 山东大学学报(工学版), 2018, 48(2): 14-21. |
| [2] | 左俊彦, 张建国, 钟涛. 基于Canny检测的股骨边缘轮廓连接算法[J]. 山东大学学报(工学版), 2015, 45(3): 65-72. |
| [3] | 张潇丹,赵力,邹采荣*. 一种改进的混合蛙跳算法求解有约束优化问题[J]. 山东大学学报(工学版), 2013, 43(1): 1-8. |
| [4] | 王新沛1,刘常春1*,白曈2. 基于均值距离的图像分割方法[J]. 山东大学学报(工学版), 2010, 40(4): 36-41. |
| [5] | 王振树 李林川 李波. 基于粒子群与模拟退火相结合的无功优化算法[J]. 山东大学学报(工学版), 2008, 38(6): 15-20. |
|