山东大学学报 (工学版) ›› 2018, Vol. 48 ›› Issue (5): 61-68.doi: 10.6040/j.issn.1672-3961.0.2018.031
刘友权( ),王晨光,侍红军
),王晨光,侍红军
Youquan LIU(),Chenguang WANG,Hongjun SHI
摘要:
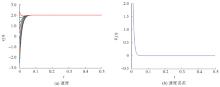
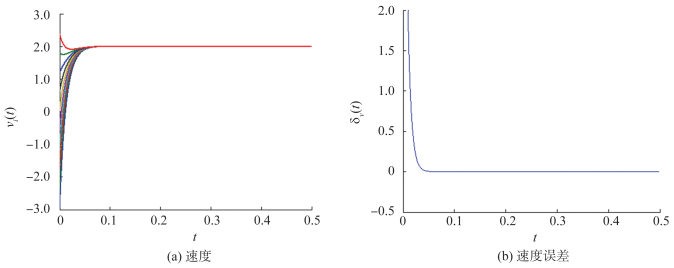
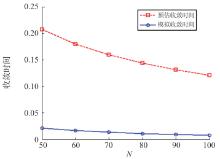
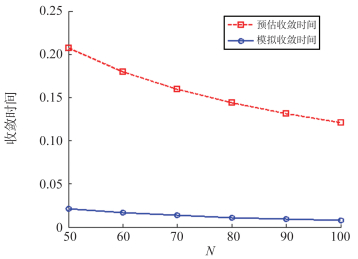
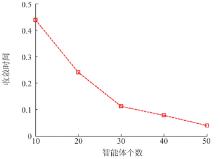
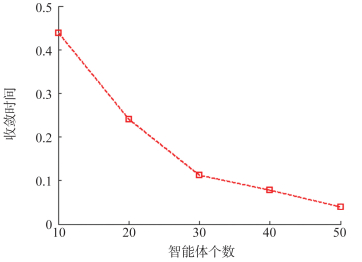
基于有限时间稳定性理论,研究主从Cucker-Smale系统的有限时间蜂拥行为。通过李雅普诺夫函数方法,得到蜂拥在有限时间发生所需的条件。研究结果表明:收敛时间和种群规模以及智能体与领导者之间的耦合强度有关。收敛时间随种群规模和耦合强度的增大而减小。在数值模拟中,速度和速度差的演化曲线证实了理论结果的可靠性。
中图分类号:
| 1 |
CUCKER F , SMALE S . Emergent behavior in flocks[J]. IEEE Transactions on Automatic Control, 2007, 52 (5): 852- 862.
doi: 10.1109/TAC.2007.895842 |
| 2 | WAN Z . Flocking for multi-agent dynamical systems[M]. Saarland Saarbrücken, Germany: Lap Lambert Academic Publishing, 2012. |
| 3 | YU W , CHEN G , CAO M . Distributed leader-follower flocking control for multi-agent dynamical systems with time-varying velocities[J]. Systems & Control Letters, 2010, 59 (9): 543- 552. |
| 4 |
DONG J , QIU L . Flocking of the Cucker-Smale model on general digraphs[J]. IEEE Transactions on Automatic Control, 2017, 62 (10): 5234- 5239.
doi: 10.1109/TAC.2016.2631608 |
| 5 | RU L , XUE X . Multi-cluster flocking behavior of the hierarchical Cucker-Smale model[J]. Journal of the Franklin Institute Engineering & Applied Mathematics, 2017, 354 (5): 2371- 2392. |
| 6 | LU J , HO D W , KURTHS J . Consensus over directed static networks with arbitrary finite communication delays[J]. Phys Rev E Stat Nonlin Soft Matter Phys, 2009, 80 (2): 066121. |
| 7 |
GUAN Z , LIU Z , FENG G , et al. Impulsive consensus algorithms for second-order multi-agent networks with sampled information[J]. Automatica, 2012, 48 (7): 1397- 1404.
doi: 10.1016/j.automatica.2012.05.005 |
| 8 | ZHAO H , JU H . Dynamic output feedback consensus of continuous-time networked multi-agent systems[M]. New Jersey Hoboken, USA: John Wiley & Sons, Inc, 2015. |
| 9 |
LEE T H , JU H P , JI D H , et al. Leader-following consensus problem of heterogeneous multi-agent systems with nonlinear dynamics using fuzzy disturbance observer[J]. Complexity, 2014, 19 (4): 20- 31.
doi: 10.1002/cplx.v19.4 |
| 10 |
WANG X , SONG J . Synchronization of the fractional order hyberchaos Lorenz systems with activation feedback control[J]. Communications in Nonlinear Science and Numerical Simulation, 2009, 14 (8): 3351- 3357.
doi: 10.1016/j.cnsns.2009.01.010 |
| 11 |
WANG X , HE Y . Projective synchronization of fractional order chaotic system based on linear separation[J]. Physics Letters A, 2008, 372 (4): 435- 441.
doi: 10.1016/j.physleta.2007.07.053 |
| 12 |
WANG X , WANG M . Dynamic analysis of the fractional-order liu system and its synchronization[J]. Chaos, 2007, 17 (3): 033106.
doi: 10.1063/1.2755420 |
| 13 |
LIN D , WANG X . Observer-based decentralized fuzzy neural sliding mode control for interconnected unknown chaotic systems via network structure adaptation[J]. Fuzzy Sets and Systems, 2010, 161 (15): 2066- 2080.
doi: 10.1016/j.fss.2010.03.006 |
| 14 | ABD-ELAZIM S M , ALI E S . A hybrid particle swarm optimization and bacterial foraging for power system stability enhancement[J]. International Journal of Electrical Power & Energy Systems, 2013, 46 (2): 334- 341. |
| 15 |
COUZIN I D , KRAUSE J , FRANKS N R , et al. Effective leadership and decision-making in animal groups on the move[J]. Nature, 2005, 433 (7025): 513.
doi: 10.1038/nature03236 |
| 16 |
KATZ Y , TUNSTRØM K , LOANNOU C C , et al. Inferring the structure and dynamics of interactions in schooling fish[J]. Proceedings of the National Academy of Sciences of the United States of America, 2011, 108 (46): 18720- 18725.
doi: 10.1073/pnas.1107583108 |
| 17 |
TOPAZ C M , BERTOZZI A L , LEWIS M A . A nonlocal continuum model for biological aggregation[J]. Bull Math Biol, 2006, 68 (7): 1601.
doi: 10.1007/s11538-006-9088-6 |
| 18 |
ZHANG H P , BE'ER A , FLORIN E L , et al. Collective motion and density fluctuations in bacterial colonies[J]. Proceedings of the National Academy of Sciences of the United States of America, 2010, 107 (31): 13626- 13630.
doi: 10.1073/pnas.1001651107 |
| 19 |
VICSEK T , CZIROK A , BEN-JACOB E , et al. Novel type of phase transition in a system of self-driven particles[J]. Physical Review Letters, 1995, 75 (6): 1226.
doi: 10.1103/PhysRevLett.75.1226 |
| 20 | VICSEK T , ZAFEIRIS A . Collective motion[M]. Berlin Heidelberg, Germany: Springer, 1999: 152- 164. |
| 21 |
JADBABAIE A , LIN J , MORSE A S . Coordination of groups of mobile autonomous agents using nearest neighbor rules[J]. IEEE Transactions on Automatic Control, 2003, 48 (6): 988- 1001.
doi: 10.1109/TAC.2003.812781 |
| 22 | LIU Y , WU J . Flocking and asymptotic velocity of the Cucker-Smale model with processing delay[J]. Journal of Mathematical Analysis & Applications, 2014, 415 (1): 53- 61. |
| 23 | HA S Y , LEE K , LEVY D . Emergence of time-asymptotic flocking in a stochastic Cucker-Smale system[J]. Communications in Mathematical Sciences, 2009, 7 (2009): 453- 469. |
| 24 | SUN Y , LIN W . A positive role of multiplicative noise on the emergence of flocking in a stochastic Cucker-Smale system[J]. Chaos an Interdisciplinary Journal of Nonlinear Science, 2015, 16 (8): 852. |
| 25 | TON T V , LINH N T H , YAGI A . Flocking and non-flocking behavior in a stochastic Cucker-Smale system[J]. Analysis & Applications, 2014, 12 (1): 63- 73. |
| 26 | SHEN J . Cucker-Smale flocking under hierarchical leadership[J]. Siam Journal on Applied Mathematics, 2007, 68 (3): 694- 719. |
| 27 | CUCKER F , DONG J G . On the critical exponent for flocks under hierarchical leadership[J]. Mathematical Models & Methods in Applied Sciences, 2009, 19 (suppl.1): 1391- 1404. |
| 28 | LI Z , XUE X . Cucker-Smale flocking under rooted leadership with fixed and switching topologies[J]. Siam Journal on Applied Mathematics, 2010, 70 (7-8): 3156- 3174. |
| 29 | DALMAO F, MORDECKI E. Cucker-Smale flocking under hierarchical leadership and random interactions[J]. 2010, 71(4): 1307-1316. |
| 30 | LI Z , XUE X . Cucker-Smale flocking under rooted leadership with free-will agents[J]. Physica A Statistical Mechanics & Its Applications, 2014, 410 (12): 205- 217. |
| 31 | HAN Y , ZHAO D , SUN Y . Finite-time flocking problem of a Cucker-Smale-type self-propelled particle model[J]. Complexity, 2016, 21 (Suppl.1): 354- 361. |
| 32 | SUN Y , LIN W . A positive role of multiplicative noise on the emergence of flocking in a stochastic Cucker-Smale system[J]. Chaos, 2015, 16 (8): 852. |
| 33 |
OLFATI-SABER R , MURRAY R M . onsensus problems in networks of agents with switching topology and time-delays[J]. IEEE Trans. Automat. Control, 2004, 49, 1520- 1532.
doi: 10.1109/TAC.2004.834113 |
| 34 |
JIANG F , WANG L . Finite-time information consensus for multi-agent systems with fixed and switching topologies[J]. Physical D Nonlinear Phenomena, 2009, 238 (16): 1550- 1560.
doi: 10.1016/j.physd.2009.04.011 |
| 35 | HORN R A , JOHNSON C R . Matrix Analysis[M]. Cambridge: Cambridge University Press, 1985. |
| 36 |
WANG H , HAN Z Z , XIE Q Y , et al. Finite-time synchronization of uncertain unified chaotic systems based on CLF[J]. Nonlinear Analysis Real World Applications, 2009, 10 (5): 2842- 2849.
doi: 10.1016/j.nonrwa.2008.08.010 |
| 37 |
WANG L , FENG X . Finite-time consensus problems for networks of dynamic agents[J]. IEEE Transactions on Automatic Control, 2010, 55 (4): 950- 955.
doi: 10.1109/TAC.2010.2041610 |
| [1] | 周绍伟. 随机Markov跳跃系统有限时间稳定性[J]. 山东大学学报(工学版), 2016, 46(2): 78-84. |
| [2] | 李小华, 严慰, 刘洋. 广义扩展大系统的鲁棒分散有限时间关联镇定[J]. 山东大学学报(工学版), 2015, 45(6): 16-28. |
| [3] | 沈艳军1,吴超艳2. 一类链式系统部分变元渐近稳定、有限时间稳定观测器设计[J]. 山东大学学报(工学版), 2013, 43(6): 42-46. |
| [4] | 李望1,2,石咏2,马继伟2. 复杂动力学网络的有限时间外部同步[J]. 山东大学学报(工学版), 2013, 43(2): 48-53. |
| [5] | 赵占山1,2, 张静3, 孙连坤1, 丁刚1. 有限时间收敛的滑模自适应控制器设计[J]. 山东大学学报(工学版), 2012, 42(4): 74-78. |
| [6] | 杨仁明,王玉振*. 一类非线性时滞系统的有限时间稳定性[J]. 山东大学学报(工学版), 2012, 42(2): 36-44. |
| [7] | 马世敏,王玉振. 一类广义Hamilton系统的有限时间稳定性及其在仿射非线性系统控制设计中的应用[J]. 山东大学学报(工学版), 2011, 41(2): 119-125. |
| [8] | 乔伟1,王汇源1,2,吴晓娟1,刘鹏威1. 基于混沌动力学模型的群体目标检测与分类[J]. 山东大学学报(工学版), 2010, 40(2): 19-23. |
| [9] | 邓修成,沈艳军,方胜乐 . 多输入-多输出线性系统有限时间观测器设计方法[J]. 山东大学学报(工学版), 2008, 38(4): 17-21 . |
| [10] | 辛道义,刘允刚 . 非线性系统有限时间稳定性分析与控制设计[J]. 山东大学学报(工学版), 2007, 37(3): 24-30 . |
| [11] | 丁玉琴,刘允刚 . 一类非线性系统有限时间函数观测器设计方法[J]. 山东大学学报(工学版), 2007, 37(1): 56-60 . |
|