山东大学学报 (工学版) ›› 2018, Vol. 48 ›› Issue (5): 103-108.doi: 10.6040/j.issn.1672-3961.0.2018.228
张冕( ),黄颖,梅海艺,郭毓*()
),黄颖,梅海艺,郭毓*()
Mian ZHANG(),Ying HUANG,Haiyi MEI,Yu GUO*()
摘要:
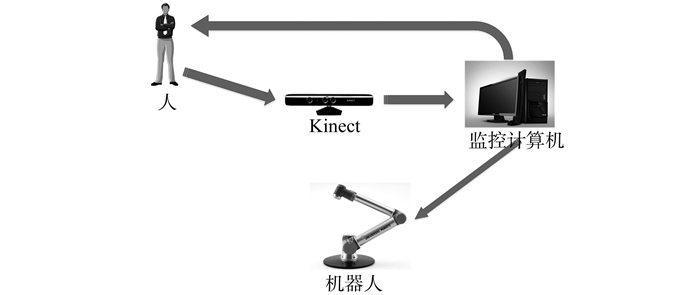
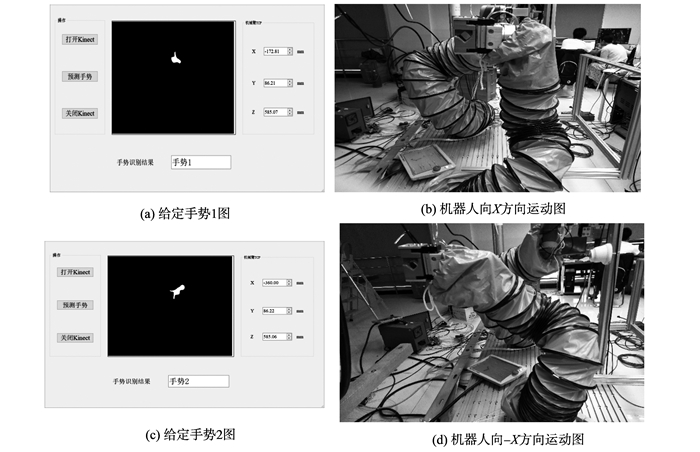
为实现操作人员与配电作业机器人的自然交互,提出一种基于Kinect手势识别的配电作业机器人智能人机交互方法。通过Kinect的深度信息及骨骼信息对操作人员的手势进行分割,选取几何不变矩Hu矩作为手势特征,采用支持向量机(support vector machine, SVM)的机器学习方法分类识别操作人员的手势。将手势映射为机器人的运动,通过手势对机器人进行运动控制。试验结果验证了本研究所提的配电作业机器人智能人机交互方法的可行性。
中图分类号:
| 1 |
胡毅. 输配电线路带电作业技术的研究与发展[J]. 高电压技术, 2006, 32 (11): 1- 10.
doi: 10.3969/j.issn.1003-6520.2006.11.001 |
|
HU Yi . Research and development of live working technology of transmission and distribution line[J]. High Voltage Technology, 2006, 32 (11): 1- 10.
doi: 10.3969/j.issn.1003-6520.2006.11.001 |
|
| 2 |
胡毅, 王力农, 邹伟. 送配电带电作业的发展与标准制定[J]. 高电压技术, 2003, 29 (4): 6- 8.
doi: 10.3969/j.issn.1003-6520.2003.04.003 |
|
HU Yi , WANG Linong , ZOU Wei . Development and standard formulation of live working for distribution[J]. High Voltage Technology, 2003, 29 (4): 6- 8.
doi: 10.3969/j.issn.1003-6520.2003.04.003 |
|
| 3 | 高焕兵, 田国会. 面向配电系统的带电抢修作业机器人[J]. 山东大学学报(工学版), 2015, 45 (1): 45- 53. |
| GAO Huanbing , TIAN Guohui . Live-repair robot for power distribution system[J]. Shandong University Journal(Engineering Edition), 2015, 45 (1): 45- 53. | |
| 4 |
蔡自兴, 郭璠. 中国工业机器人发展的若干问题[J]. 机器人技术与应用, 2013, (3): 9- 12.
doi: 10.3969/j.issn.1004-6437.2013.03.003 |
|
CAI Zixing , GUO Fan . Some problems in the development of industrial robots in China[J]. Robot Technology and Applications, 2013, (3): 9- 12.
doi: 10.3969/j.issn.1004-6437.2013.03.003 |
|
| 5 | 戚晖,赵玉良,李健,等.高压带电作业机器人主从式液压机械臂系统: CN201210096179.6[P]. 2012-08-01. |
| 6 | 李健,戚晖,李运厂.一种高压带电作业主从控制机器人作业平台: CN201210095860.9[P]. 2012-08-01. |
| 7 | 刘金存.带电作业机器人主从控制的研究[D].济南:山东建筑大学, 2014. |
| LIU Jincun. Research on master-slave control of live working Robot[D]. Jinan: Shandong University of Architecture, 2014. | |
| 8 | 高焕兵.带电抢修作业机器人运动分析与控制方法研究[D].济南:山东大学, 2015. |
| GAO Huanbing. Research on motion analysis and control method of robot for live repair work[D]. Jinan: Shandong University, 2015. | |
| 9 | 周航.基于计算机视觉的手势识别系统研究[D].北京:北京交通大学, 2007. |
| ZHOU Hang. Research on gesture recognition system based on computer vision[D]. Beijing: Beijing Jiaotong University, 2007. | |
| 10 | KANG J , SEO D , JUNG D . A Study on the control method of 3-dimensional space application using Kinect system[J]. International Journal of Computer Science and Network Security, 2011, 11 (9): 55- 59. |
| 11 | WONGPHATI M , OSAWA H , IMAI M . User-defined gestures for controlling primitive motions of an end effector[J]. Advanced Robotics, 2015, 29 (4): 225- 238. |
| 12 |
林海波, 梅为林, 张毅, 等. 基于Kinect骨骼信息的机械臂体感交互系统的设计与实现[J]. 计算机应用与软件, 2013, 30 (2): 157- 160.
doi: 10.3969/j.issn.1000-386x.2013.02.040 |
|
LIN Haibo , MEI Weilin , ZHANG Yi , et al. Design and implementation of mechanical arm body sense interaction system based on Kinect skeleton information[J]. Computer Applications and Software, 2013, 30 (2): 157- 160.
doi: 10.3969/j.issn.1000-386x.2013.02.040 |
|
| 13 | 张莹莹, 郭星. 基于Kinect动态手势识别算法的研究与实现[J]. 计算机技术与发展, 2017, 27 (12): 11- 15. |
| ZHANG Yingying , GUO Xing . Research and implementation of the algorithm based on the Kinect dynamic gesture recognition[J]. Computer Technology and Development, 2017, 27 (11): 11- 15. | |
| 14 | 于泽升, 崔文华, 史添玮. 基于Kinect手势识别的应用与研究[J]. 计算机科学, 2016, (增刊2): 568- 571. |
| YU Zesheng , CUI Wenhua , SHI Tianwei . Application and research on the Kinect gesture recognition[J]. Computer Science, 2016, (Suppl.2): 568- 571. | |
| 15 |
DING J , CHANG C W . An adaptive hidden Markov model-based gesture recognition approach using Kinect to simplify large-scale video data processing for humanoid robot imitation[J]. Multimedia Tools and Applications, 2016, 75 (23): 15537- 15551.
doi: 10.1007/s11042-015-2505-9 |
| 16 | 余涛, 叶金永, 邵菲杰, 等. Kinect核心技术之骨架追踪技术[J]. 数字技术与应用, 2012, (10): 115. |
| YU Tao , YE Jinyong , SHAO Feijie , et al. Skeleton tracking technology for the Kinect core technology[J]. Digital Technology and Applications, 2012, (10): 115. | |
| 17 | 江冬梅.基于视觉的手势识别及其在人机交互中的应用[D].济南:山东大学, 2005. |
| JIANG Dongmei. Vision-based gesture recognition and its application in human-computer interaction[D]. Jinan: Shandong University, 2005. | |
| 18 | 王松林.基于Kinect的手势识别与机器人控制技术研究[D].北京:北京交通大学, 2014. |
| WANG Songlin. Research on gesture recognition and robot control technology based on Kinect[D]. Beijing: Beijing Jiaotong University, 2014. | |
| 19 | 罗元, 谢彧, 张毅. 基于Kinect传感器的智能轮椅控制系统的设计与实现[J]. 机器人, 2012, 34 (1): 110- 113, 119. |
| LUO Yuan , XIE Yu , ZHANG Yi . Design and implementation of intelligent wheelchair control system based on Kinect sensor[J]. Robot, 2012, 34 (1): 110- 113, 119. | |
| 20 |
王耀明. 几何矩及其几何矩不变量(英文)[J]. 上海电机学院学报, 2006, (2): 7- 10.
doi: 10.3969/j.issn.2095-0020.2006.02.003 |
|
WANG Yaoming . Geometric moment and its geometric moment invariants (English)[J]. Journal of Shanghai Institute of Electrical Engineering, 2006, (2): 7- 10.
doi: 10.3969/j.issn.2095-0020.2006.02.003 |
| [1] | 刘洋,刘博,王峰. 基于Parameter Server框架的大数据挖掘优化算法[J]. 山东大学学报(工学版), 2017, 47(4): 1-6. |
| [2] | 魏波,张文生,李元香,夏学文,吕敬钦. 一种选择特征的稀疏在线学习算法[J]. 山东大学学报(工学版), 2017, 47(1): 22-27. |
| [3] | 周旺,张晨麟,吴建鑫. 一种基于Hartigan-Wong和Lloyd的定性平衡聚类算法[J]. 山东大学学报(工学版), 2016, 46(5): 37-44. |
| [4] | 孟令恒,丁世飞. 基于单静态图像的深度感知模型[J]. 山东大学学报(工学版), 2016, 46(3): 37-43. |
| [5] | 刘杰, 杨鹏, 吕文生, 刘阿古达木, 刘俊秀. 基于气象因素的PM2.5质量浓度预测模型[J]. 山东大学学报(工学版), 2015, 45(6): 76-83. |
| [6] | 郑毅, 朱成璋. 基于深度信念网络的PM2.5预测[J]. 山东大学学报(工学版), 2014, 44(6): 19-25. |
| [7] | 姬帅, 张承瑞, 孙书仁, 胡天亮. 基于实时以太网的开放式运动控制系统[J]. 山东大学学报(工学版), 2014, 44(5): 7-13. |
| [8] | 于静1,田国会1*,尹建芹2. 基于深度信息的动态手势识别算法[J]. 山东大学学报(工学版), 2014, 44(3): 52-56. |
| [9] | 谢琳1,殷熙尧2,李凡长3,吴佳3. 一种逆归结学习表示[J]. 山东大学学报(工学版), 2013, 43(4): 46-50. |
| [10] | 何雪英1,2, 秦伟1, 尹义龙1*, 赵联征1,乔昊3. 基于机器学习的视频指纹识别[J]. 山东大学学报(工学版), 2011, 41(4): 29-33. |
| [11] | 梁春林1,彭凌西2*. 基于免疫网络的无监督式分类算法[J]. 山东大学学报(工学版), 2010, 40(5): 82-86. |
| [12] | 郭茂祖 邹权 李文滨 韩英鹏. 生物信息学中的学习问题[J]. 山东大学学报(工学版), 2009, 39(3): 1-6. |
|