山东大学学报 (工学版) ›› 2019, Vol. 49 ›› Issue (1): 55-65.doi: 10.6040/j.issn.1672-3961.0.2018.301
周风余( ),万方*(),焦建成,边钧健
),万方*(),焦建成,边钧健
Fengyu ZHOU(),Fang WAN*(),Jiancheng JIAO,Junjian BIAN
摘要:
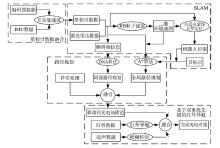
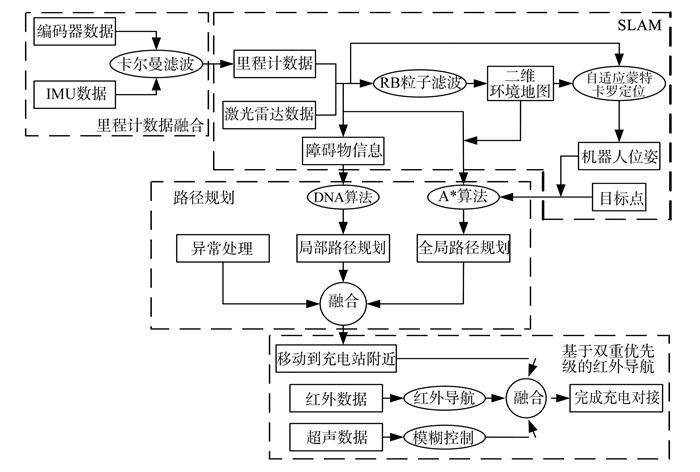
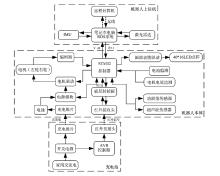
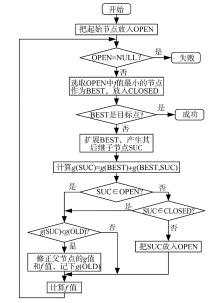
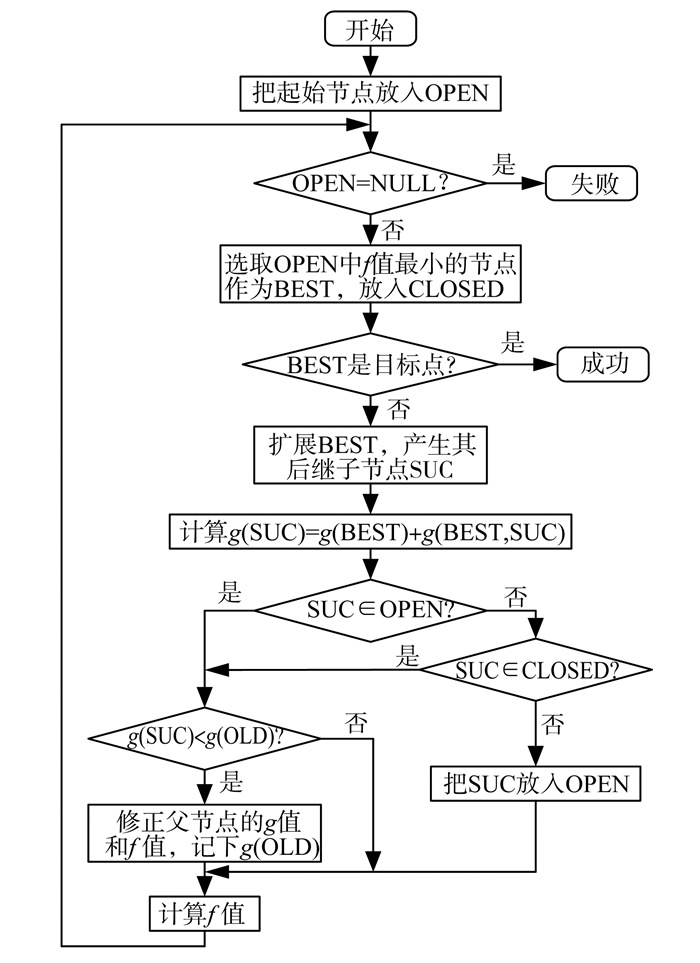
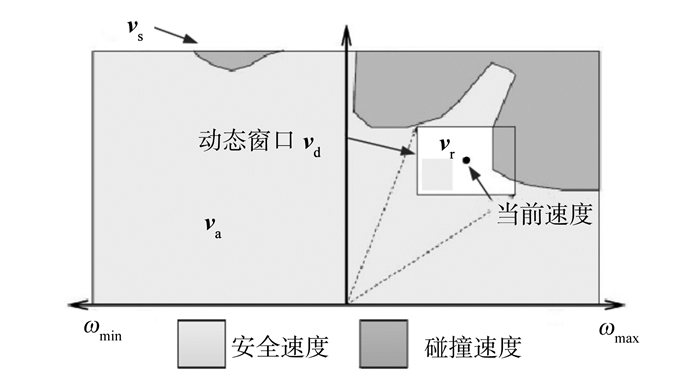
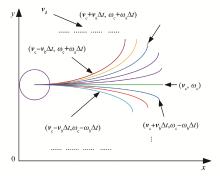
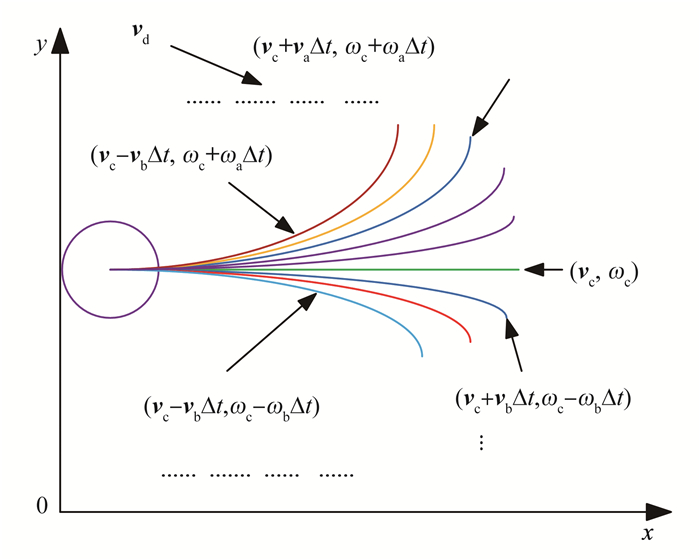
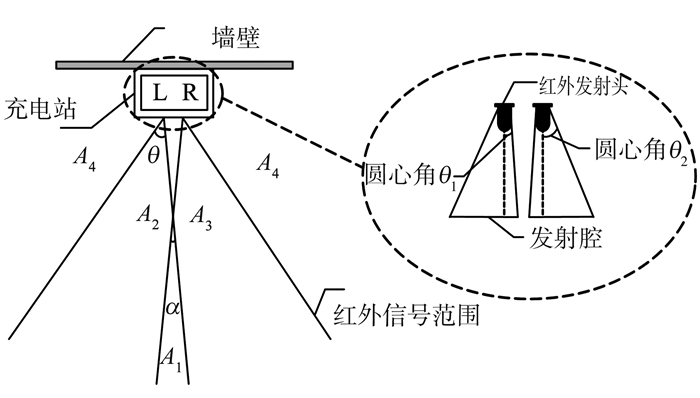
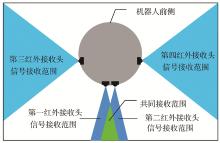
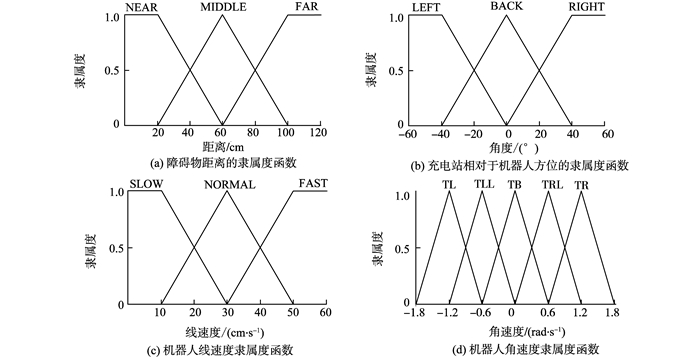
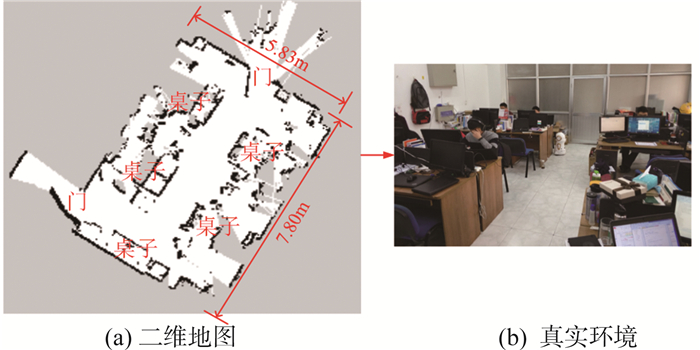
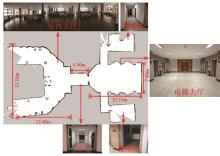
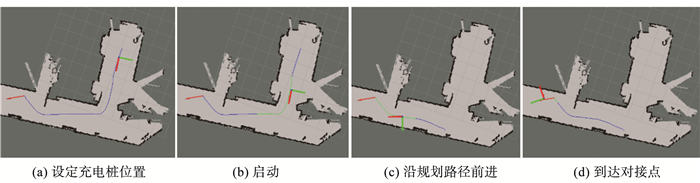
针对家庭陪护机器人电池容量有限,工作环不连续的问题,设计一种基于机器人操作系统(robot operating system, ROS)的家庭陪护机器人自主充电分级对接系统。采用卡尔曼滤波算法将编码器数据和惯性测量单元(inertial measurement unit, IMU)数据进行融合,同时结合激光雷达数据并基于Rao-Blackwellized粒子滤波即时定位与构图(simultaneous localization and mapping, SLAM)算法构建环境二维栅格地图;采用A*算法和动态窗口(dynamic window approach, DWA)算法进行全局路径规划和局部路径规划,使机器人行驶至充电站附近或所在房间;采用基于双重优先级的红外导航对接算法引导机器人驶向充电站,完成与充电站的精确对接。试验结果表明,该系统有效地解决了传统方法中充电距离有限的问题,并且具有较高的对接效率、成功率、准确度和环境普适性,完全满足家庭陪护机器人的充电需求,具有较好的应用价值。
中图分类号:
| 1 |
王建元, 郭威, 刘洋, 等. 基于图像识别的移动机器人自动完成充电[J]. 电测与仪表, 2017, 54 (10): 103- 107.
doi: 10.3969/j.issn.1001-1390.2017.10.018 |
|
WANG Jianyuan , GUO Wei , LIU Yang , et al. Automatic charging of mobile robot based on image recognition[J]. Electrical Measurement and Instrumentation, 2017, 54 (10): 103- 107.
doi: 10.3969/j.issn.1001-1390.2017.10.018 |
|
| 2 | 周海波. 基于红外线的智能小车自动导航充电系统的设计[J]. 数字技术与应用, 2014, 2 (2): 168. |
| ZHOU Haibo . Design of intelligent car′s automatic navigation charging system based on infrared ray[J]. Digital Technology and Application, 2014, 3 (2): 168. | |
| 3 |
崔志恒, 韩红玲. 红外导航自主充电室内移动机器人设计[J]. 实验室研究与探索, 2012, 31 (10): 33- 36.
doi: 10.3969/j.issn.1006-7167.2012.10.010 |
|
CUI Zhiheng , HAN Hongling . Design of an auto-recharging mobile robot navigated by infrared ray[J]. Research and Exploration in Laboratory, 2012, 31 (10): 33- 36.
doi: 10.3969/j.issn.1006-7167.2012.10.010 |
|
| 4 | NOURBAKHSH I , BOBENAGE J , GRANGE S , et al. An affective mobile robot with a full-time job[J]. Artificial Intelligence, 1999, 114 (1/2): 95- 124. |
| 5 | SILVERMAN M C, NIES D, JUNG B, et al. Staying alive: a docking station for autonomous robot recharging[C]//IEEE International Conference on Robotics and Automation. Washington, D.C, USA: IEEE, 2002: 1050-1055. |
| 6 |
SENANAYAKE H M B , AKINSANMI O , MAZU M B . An experimental autonomous path tracking mobile robot[J]. Advanced Materials Research, 2009, 62-64, 181- 186.
doi: 10.4028/www.scientific.net/AMR.62-64 |
| 7 | HUANG Y , ZHAO H , GAO L I , et al. Self recharging algorithm for indoor mobile robot[J]. Journal of Jishou University, 2016, 32 (2): 132- 145. |
| 8 |
朱世强, 刘瑜, 庞作伟, 等. 自主吸尘机器人的研究现状[J]. 机器人, 2004, 26 (6): 569- 574.
doi: 10.3321/j.issn:1002-0446.2004.06.019 |
|
ZHU Shiqiang , LIU Yu , PANG Zuowei , et al. Overview of autonomous cleaning robots[J]. Robot, 2004, 26 (6): 569- 574.
doi: 10.3321/j.issn:1002-0446.2004.06.019 |
|
| 9 | 吴海彬, 朱世强, 马翔. 自主吸尘机器人在非结构环境下的避障与路径规划研究[J]. 机器人, 2000, 22 (7): 627- 630. |
| WU Haibin , ZHU Shiqiang , MA Xiang . Research on obstacle avoidance and path planning of autonomous vacuum cleaning robot in unstructured environment[J]. Robot, 2000, 22 (7): 627- 630. | |
| 10 |
郝宗波, 洪炳镕. 室内环境下移动机器人自主充电研究[J]. 哈尔滨工业大学学报, 2005, 37 (7): 885- 887.
doi: 10.3321/j.issn:0367-6234.2005.07.007 |
|
HAO Zongbo , HONG Bingrong . Research on auto-recharging for mobile robot in indoor environment[J]. Journal of Harbin Institute of Technology, 2005, 37 (7): 885- 887.
doi: 10.3321/j.issn:0367-6234.2005.07.007 |
|
| 11 | 黎阳生.变电站巡检机器人自主充电装置及对接控制研究[D].重庆:重庆大学, 2013. |
| LI Yangsheng. Study on auto-recharging device and docking control for substation inspection robot[D]. Chongqing: Chongqing University, 2013. | |
| 12 | KONOLIGE K, GRISETTI G, KMMERLE R, et al. Efficient sparse pose adjustment for 2nd mapping[C]//International Conference on Intelligent Robots and Systems. Taiwan, China: IEEE, 2010: 22-29. |
| 13 | KOHLBRECHER S, STRYK O V, MEYER J, et al. A flexible and scalable SLAM system with full 3D motion estimation[C]//IEEE International Symposium on Safety, Security, and Rescue Robotics. Kyoto, Japan: IEEE, 2011: 155-160. |
| 14 | HESS W, KOHLER D, RAPP H, et al. Real-time loop closure in 2D LIDAR SLAM[C]//International Conference on Robotics & Automation. Stockholm, Sweden: IEEE, 2016: 1271-1278. |
| 15 | DAVISON A J , REID I D , MOLTON N D , et al. MonoSLAM: real-time single camera SLAM[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2007, (6): 1052- 1067. |
| 16 | OLSON E B . Real-time correlative scan matching[J]. Ann Arbor, 2009, 10 (1): 98- 109. |
| 17 | 未永飞, 杜正春, 姚振强. 中值滤波在激光雷达点云数据预处理中的应用[J]. 激光技术, 2009, 33 (2): 213- 216. |
| WEI Yongfei , DU Zhengchun , YAO Zhenqiang . Application of median filter in point cloud data pre-processing lidar[J]. Laser Technology, 2009, 33 (2): 213- 216. | |
| 18 |
GRISETTI G , STACHNISS C , BURGARD W . Improved techniques for grid mapping with rao-blackwellized particle filters[J]. IEEE Transactions on Robotics, 2007, 23 (1): 34- 46.
doi: 10.1109/TRO.2006.889486 |
| 19 | 王殿君. 基于改进A*算法的室内移动机器人路径规划[J]. 清华大学学报(自然科学版), 2012, 52 (8): 1085- 1089. |
| WANG Dianjun . Indoor mobile-robot path planning based on an improved A* algorithm[J]. Journal of Tsinghua University (Science and Technology), 2012, 52 (8): 1085- 1089. | |
| 20 | 朱大奇, 颜明重. 移动机器人路径规划技术综述[J]. 控制与决策, 2010, 25 (7): 961- 967. |
| ZHU Daqi , YAN Mingzhong . Survey on technology of mobile robot path planning[J]. Control and Decision, 2010, 25 (7): 961- 967. | |
| 21 |
曲道奎, 杜振军, 徐殿国, 等. 移动机器人路径规划方法研究[J]. 机器人, 2008, 30 (2): 97- 101.
doi: 10.3321/j.issn:1002-0446.2008.02.001 |
|
QU Daokui , DU Zhenjun , XU Dianguo , et al. Research on path planning for a mobile robot[J]. Robot, 2008, 30 (2): 97- 101.
doi: 10.3321/j.issn:1002-0446.2008.02.001 |
| [1] | 赵天怀,王目树,潘为刚,康超,秦石铭,徐飞. 挖掘机智能辅助施工系统设计[J]. 山东大学学报 (工学版), 2023, 53(4): 163-172. |
| [2] | 张飞凯,黄永忠,李连茂,秦剑,刘晨. 基于Dijkstra算法的货运索道路径规划方法[J]. 山东大学学报 (工学版), 2022, 52(6): 176-182. |
| [3] | 王雨,刘延俊,贾华,薛钢. 基于强化RRT算法的机械臂路径规划[J]. 山东大学学报 (工学版), 2022, 52(6): 123-130. |
| [4] | 吴建清,宋修广. 同步定位与建图技术发展综述[J]. 山东大学学报 (工学版), 2021, 51(5): 16-31. |
| [5] | 肖浩,廖祝华,刘毅志,刘思林,刘建勋. 实际环境中基于深度Q学习的无人车路径规划[J]. 山东大学学报 (工学版), 2021, 51(1): 100-107. |
| [6] | 李彩虹,方春,王志强,夏斌,王凤英. 基于超混沌同步控制的移动机器人全覆盖路径规划[J]. 山东大学学报 (工学版), 2019, 49(6): 63-72. |
| [7] | 张强. 核环境多关节蛇形机械臂的运动控制系统设计[J]. 山东大学学报 (工学版), 2018, 48(6): 122-131. |
| [8] | 张丽,赵春霞*. 一种基于迭代EKF的FastSLAM算法[J]. 山东大学学报(工学版), 2012, 42(4): 41-47. |
| [9] | 严宣辉, 肖国宝*. 基于定长实数路径编码机制的移动机器人路径规划[J]. 山东大学学报(工学版), 2012, 42(1): 59-65. |
| [10] | 刘彬,张仁津. 一种采用两段粒子群优化的路径规划方法[J]. 山东大学学报(工学版), 2012, 42(1): 12-18. |
| [11] | 陈明志1,许春耀2,陈健2,余轮2. 基于语义信息的虚拟环境路径规划[J]. 山东大学学报(工学版), 2011, 41(4): 106-112. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 791
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 1911
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Cited |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
| Shared | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Discussed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|