山东大学学报 (工学版) ›› 2019, Vol. 49 ›› Issue (6): 63-72.doi: 10.6040/j.issn.1672-3961.0.2019.173
李彩虹( ),方春,王志强,夏斌,王凤英
),方春,王志强,夏斌,王凤英
Caihong LI(),Chun FANG,Zhiqiang WANG,Bin XIA,Fengying WANG
摘要:
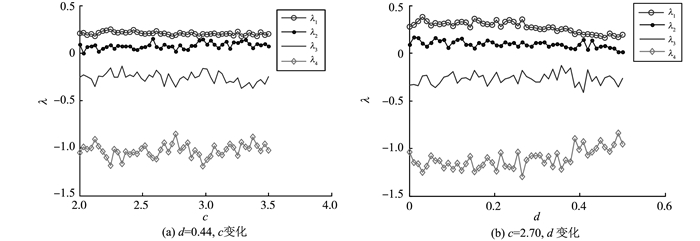
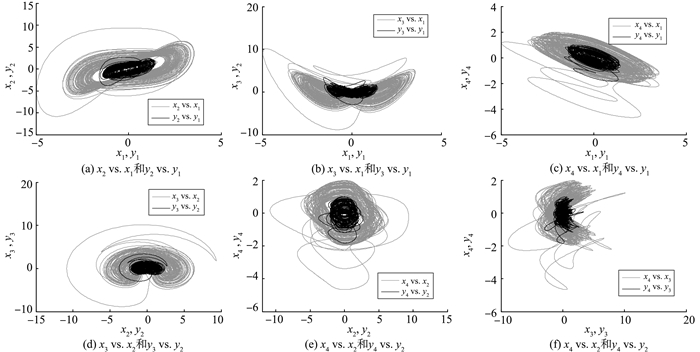
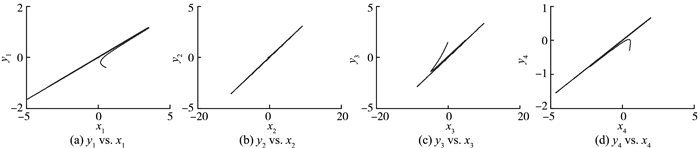
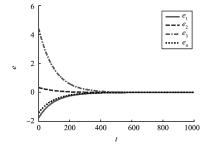
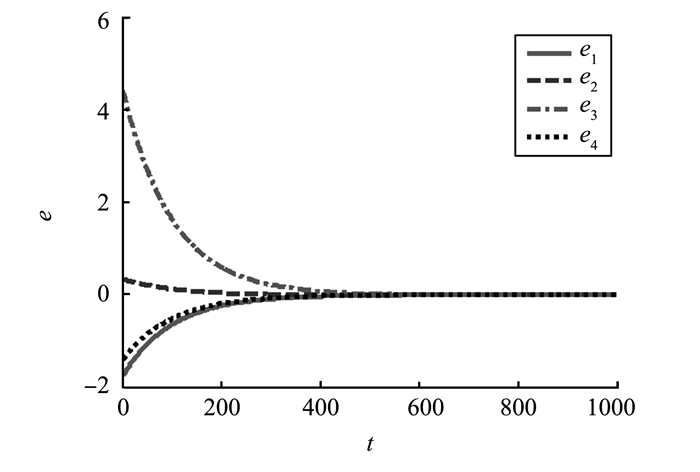
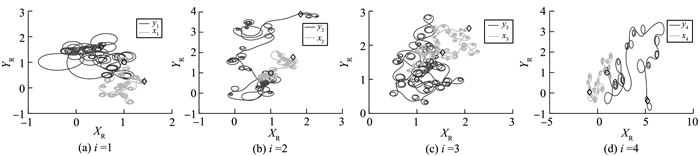
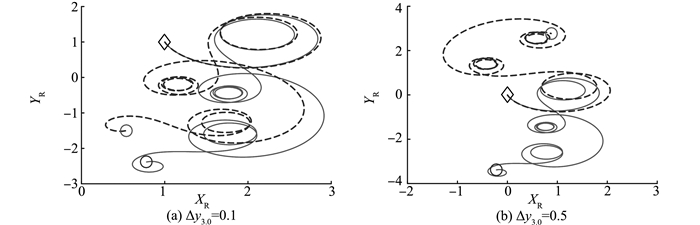
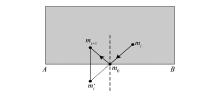
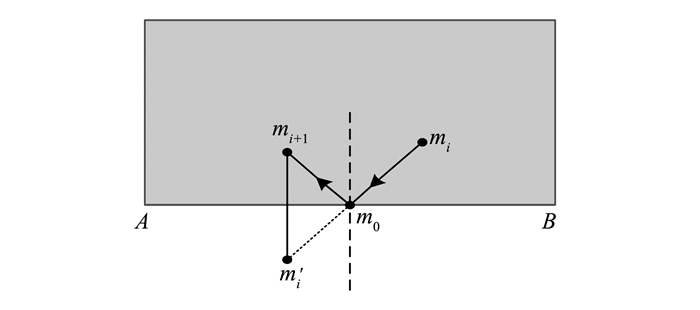
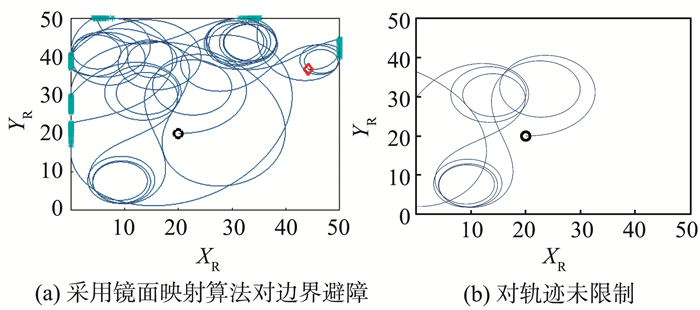
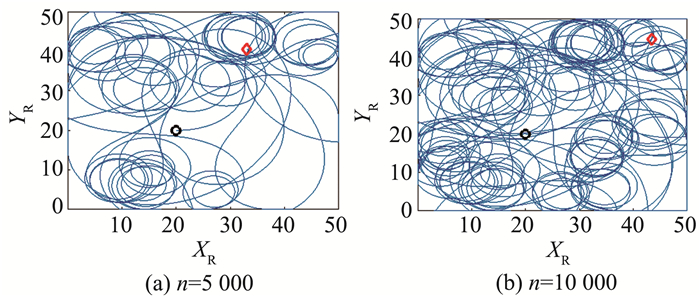
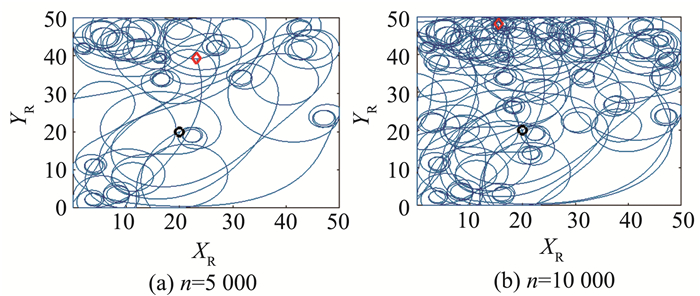
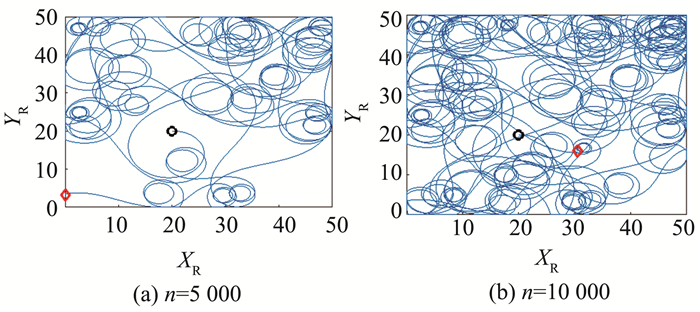
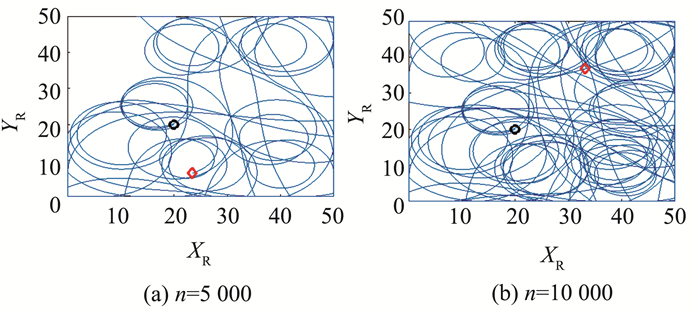
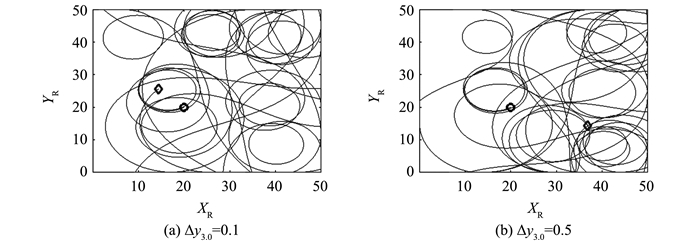
针对移动机器人执行警戒、巡逻等特殊任务的随机性、遍历性等需求,提出一种基于超混沌同步控制的移动机器人全覆盖路径规划方法。以四维超混沌Lorenz系统为主驱动方程,利用单边耦合同步控制构造超混沌同步响应方程;将同步后的超混沌同步响应方程与移动机器人运动学方程相结合,构造混沌机器人路径规划器,产生满足特殊任务要求的全覆盖遍历轨迹;利用镜面映射方法对覆盖轨迹运行范围进行限制和对运行边界进行静态避障。对规划轨迹进行定性分析和定量计算发现,与同步以前的超混沌方程相比,利用超混沌同步方法构造后产生的全覆盖轨迹具有更好的遍历覆盖特性和随机特性,能够满足自主移动机器人执行警戒、巡逻等特殊任务的需求。
中图分类号:
| 1 |
李伟莉, 赵东辉. 基于栅格法与神经元的机器人全区域覆盖算法[J]. 机械设计与制造, 2017, (8): 232- 234.
doi: 10.3969/j.issn.1001-3997.2017.08.065 |
|
LI Weili , ZHAO Donghui . Complete coverage path planning for mobile robot based on grid method and neuronal[J]. Machinery Design & Manufacture, 2017, (8): 232- 234.
doi: 10.3969/j.issn.1001-3997.2017.08.065 |
|
| 2 | 郭典新, 高龙琴, 李志昂, 等. 割草机器人全覆盖式路径规划平台设计与实现[J]. 现代制造工程, 2018, (11): 50- 53. |
| GUO Dianxin , GAO Longqin , LI Zhiang , et al. Mowing robot full coverage path planning platform design and implementation[J]. Modern Manufacturing Engineering, 2018, (11): 50- 53. | |
| 3 | PARK E , KIM K J , DEL P , et al. Energy efficient complete coverage path planning for vacuum cleaning robots[J]. Lecture Notes in Electrical Engineering: Future Information Technology: Applicationand Service, 2012, 164 (1): 23- 31. |
| 4 | CURIAC D I , BANIAS O , VOLOSENCU C , et al. Novel bioinspired approach based on chaotic dynamics for robot patrolling missions with adversaries[J]. Entropy, 2018, 20 (5): 1- 17. |
| 5 | PEITGEN H O , JVRGENS H , SAUPE D . Chaos and fractals: new Frontiers of science[M]. New York, America: Springer, 2004. |
| 6 | SEKIGUCHI A , NAKAMURA Y . The chaotic mobile robot[J]. IEEE International Conference on Intelligent Robots and Systems, 1999, 1999 (1): 172- 178. |
| 7 |
VOLOS CH K , KYPRIANIDIS I M , STOUBOULOS I N . Experimental investigation on coverage performance of a chaotic autonomous mobile robot[J]. Robotics and Autonomous Systems, 2013, 61 (12): 1314- 1322.
doi: 10.1016/j.robot.2013.08.004 |
| 8 | FAHMY A A . Performance evaluation of chaotic mobile robot controllers[J]. International Transaction Journal of Engineering, Management & Applied Sciences & Technologies, 2012, 3 (2): 145- 158. |
| 9 |
CURIAC D I , VOLOSENCU C . Path planning algorithm based on arnold cat map for surveillance UAVs[J]. Defence Science Journal, 2015, 65 (6): 483- 488.
doi: 10.14429/dsj.65.8483 |
| 10 | MARTINS-FILHO L S , MACAU E E N . Patrol mobile robots and chaotic trajectories[J]. Mathematical Problems in Engineering, 2007, 2007, 1- 13. |
| 11 | LI C H , WANG ZH Q , FANG CH , et al. An integrated algorithm of CCPP task for autonomous mobile robot under special missions[J]. International Journal of Computational Intelligence Systems, 2018, 2018 (11): 1357- 1368. |
| 12 | LI C H , SONG Y , WANG F Y , et al. A chaotic coverage path planner of the mobile robot based on the Chebychev map for special missions[J]. Frontiers of Information Technology & Electronic Engineering, 2017, 18 (9): 1305- 1319. |
| 13 | LI C H , SONG Y , WAGN F Y , et al. A bounded strategy of the mobile robot coverage path planning based on Lorenz chaotic system[J]. International Journal of Advanced Robotic Systems, 2016, 2016 (5): 1- 9. |
| 14 |
SHEN CH W , YU S M , LV J H , et al. A systematic methodology for constructing hyperchaotic systems with multiple positive Lyapunov exponents and circuit implementation[J]. IEEE Transactions on Circuits and Systems Ⅰ: Regular Papers, 2014, 61 (3): 854- 864.
doi: 10.1109/TCSI.2013.2283994 |
| 15 | SOLAMI E A , AHMAD M , VOLOS C , et al. A new hyperchaotic system-based design for efficient bijective substitution-boxes[J]. Entropy, 2018, 20 (525): 1- 17. |
| 16 | 朱道宇. 一个新的超混沌系统的叉型分支和复杂动力学[J]. 贵州大学学报(自然科学版), 2017, 34 (3): 10- 14. |
| ZHU Daoyu . Pitchfork bifurcation and complex dynamics of a new hyperchaotic system[J]. Journal of Guizhou University(Natural Science), 2017, 34 (3): 10- 14. | |
| 17 | PAULO C R . Hyperchaos and quasiperiodicity from a four-dimensional system based on the Lorenz system[J]. European Physical Journal B, 2017, 90 (251): 1- 7. |
| 18 |
温贺平. 正弦驱动的chen超混沌系统动力学特性及其电路仿真[J]. 合肥工业大学学报(自然科学版), 2018, 41 (8): 1046- 1051.
doi: 10.3969/j.issn.1003-5060.2018.08.008 |
|
WEN Heping . Dynamic characteristics and circuit simulation of Chen hyperchaotic system driven by sine wave[J]. Journal of Hefei University of Technology (Natural Science), 2018, 41 (8): 1046- 1051.
doi: 10.3969/j.issn.1003-5060.2018.08.008 |
|
| 19 | THABET H, SEDDIK H. Generating a hyper-chaotic system from 3D chaotic behaivor[C]//2nd International Conference on Advanced Technologies for Signal and Image Processing. Monastir, Tunisia: Institute of Electrical and Electronics Engineers Inc, 2016: 46-51. |
| 20 |
SHEN CH W , YU S M , L J H , et al. Constructing hyperchaotic systems at will[J]. International Journal of Circuit Theory and Applications, 2015, 43 (12): 2039- 2056.
doi: 10.1002/cta.2062 |
| 21 |
FALLAHI K , LEUNG H . A cooperative mobile robot task assignment and coverage planning based on chaos synchronization[J]. International Journal of Bifurcation and Chaos, 2010, 20 (1): 161- 176.
doi: 10.1142/S021812741002548X |
| 22 |
陈杰睿, 冯平, 许泽凯. 一种单信道超混沌保密通信的实现[J]. 计算机与数字工程, 2017, 45 (8): 1566- 1568.
doi: 10.3969/j.issn.1672-9722.2017.08.022 |
|
CHEN Jierui , FENG Ping , XU Zekai . Implementation of a secure communication based on single-hannel synchronization of hyperchaos[J]. Computer & Digital Engineering, 2017, 45 (8): 1566- 1568.
doi: 10.3969/j.issn.1672-9722.2017.08.022 |
|
| 23 | FAHIM H M. Synchronization of hyperchaotic systems with application to secure communication[C]//9th Annual IEEE International Systems Conference. Vancouver, BC, Canada: Institute of Electrical and Electronics Engineers Inc., 2015: 121-126. |
| 24 |
AMMAR S , ABDELKRIM B , SALAH L . Prediction-based feedback control and synchronization algorithm of fractional-order chaotic systems[J]. Nonlinear Dynamics, 2016, 85 (4): 2183- 2206.
doi: 10.1007/s11071-016-2823-0 |
| 25 | MAO B X . Four methods for sliding mode synchronization of fractional new hyperchaotic system[J]. Paper Asia, Compendium5, 2018, 2018 (1): 118- 122. |
| 26 |
SUNDARAPANDIAN V , TAHER A A , ABDESSELEM B . A novel 4-D hyperchaotic system with two quadratic nonlinearities and its adaptive synchronisation[J]. International Journal of Automation and Control, 2018, 12 (1): 5- 26.
doi: 10.1504/IJAAC.2018.088612 |
| 27 | VOLOS C K , KYPRIANIDIS I M , IOANNIS N , et al. Cooperation of autonomous mobile robots for surveillance missions based on hyperchaos synchronization[J]. Journal of Applied Mathematics & Bioinformatics, 2016, 6 (3): 125- 143. |
| [1] | 刘美珍,周风余,李铭,王玉刚,陈科. 基于模型不确定补偿的轮式移动机器人反演复合控制[J]. 山东大学学报 (工学版), 2019, 49(6): 36-44. |
| [2] | 严宣辉, 肖国宝*. 基于定长实数路径编码机制的移动机器人路径规划[J]. 山东大学学报(工学版), 2012, 42(1): 59-65. |
| [3] | 田国会,张涛涛*,吴皓,薛英花,周风余. 基于分布式导航信息的大范围环境机器人导航[J]. 山东大学学报(工学版), 2011, 41(1): 24-31. |
| [4] | 李贻斌1,李彩虹1,2,宋勇1. 基于模糊神经网络的移动机器人自适应行为设计[J]. 山东大学学报(工学版), 2010, 40(2): 28-33. |
| [5] | 牛君,李贻斌,宋锐 . 一种基于激光信息的移动机器人两步自定位方法[J]. 山东大学学报(工学版), 2007, 37(3): 46-50 . |
|