山东大学学报 (工学版) ›› 2018, Vol. 48 ›› Issue (6): 122-131.doi: 10.6040/j.issn.1672-3961.0.2018.237
张强( )
)
Qiang ZHANG()
摘要:
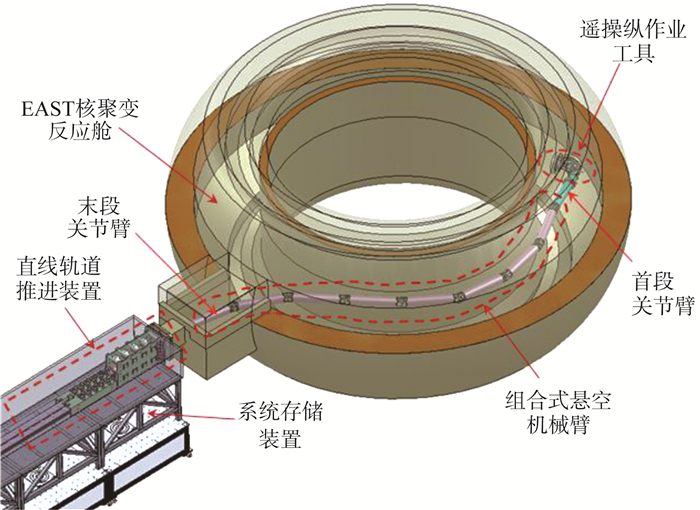
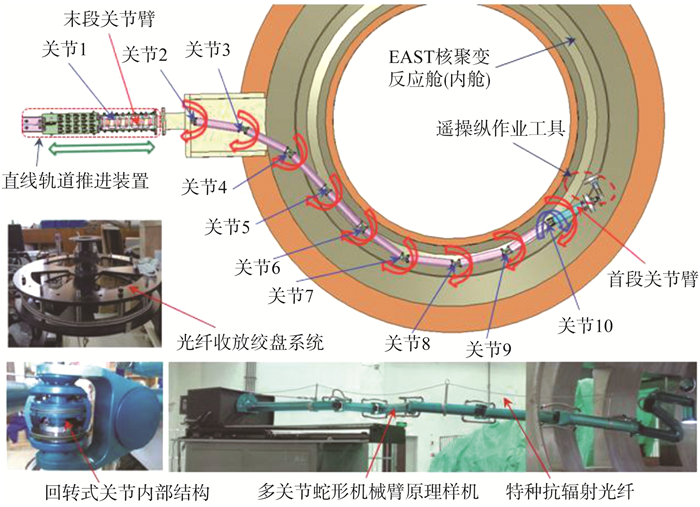
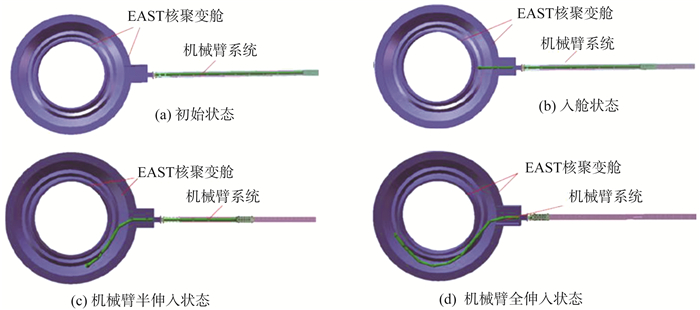
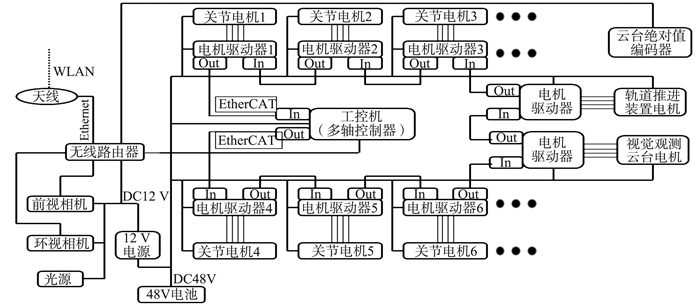
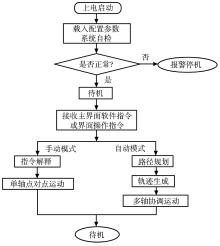
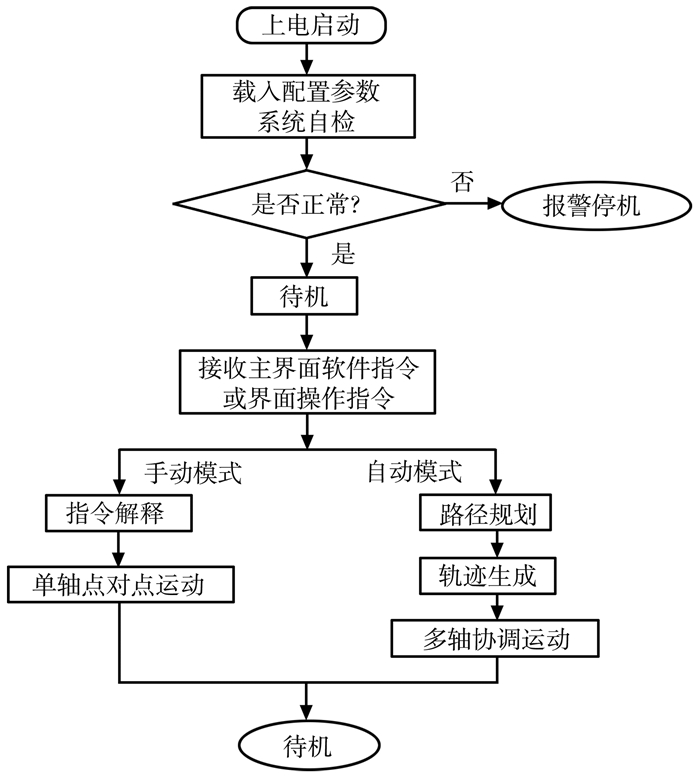
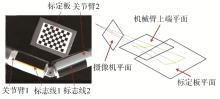
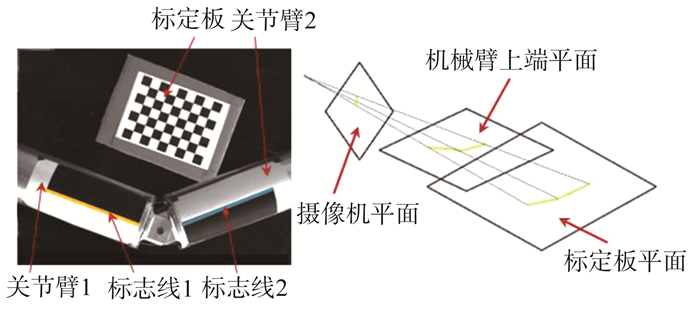
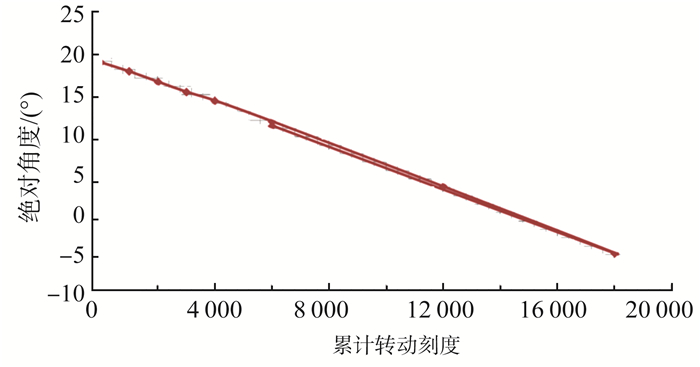
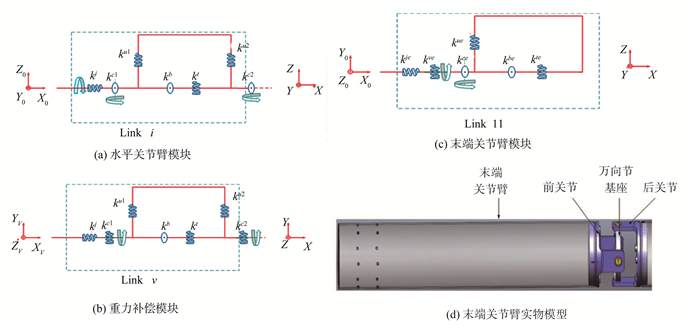
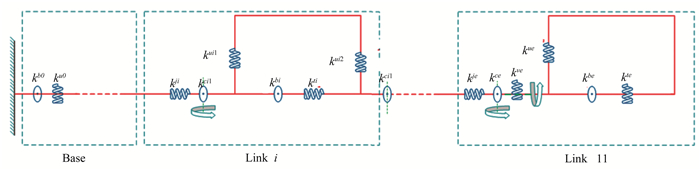
以核聚变反应舱的探测和维护作业为例,设计一种具有多关节串联式结构的蛇形遥操纵机械臂系统,结构采用轨道推送加悬臂调整的复合式操控方案。针对机械臂执行全舱作业的运动需求,对机械臂运动轨迹进行仿真分析。设计包括路径规划与轨迹控制等的机械臂运动控制算法,构建各关节在运动学上能够同步运行的多轴协调控制系统。通过搭建模拟舱几何环境,对机械臂进行运动测试,完成关节旋转角度的控制精度评估。构建机械臂系统的重力补偿模块,通过柔性模型的仿真验证对机械臂系统的末端定位精度加以评估。测试结果验证了运动控制系统的有效性。
中图分类号:
| 1 | PAMPIN R , DAVIS A , IZQUIERDO J , et al. Developments and needs in nuclear analysis of fusion technology[J]. Fusion Engineering and Design, 2013, 88 (6): 454- 460. |
| 2 | CHOI C , TESINI A , SUBRAMANIAN R , et al. Multi-purpose deployer for ITER in-vessel maintenance[J]. Fusion Engineering and Design, 2015, 98 (10): 1448- 1452. |
| 3 | GARGIULO L , BAYETTI P , BRUNO V , et al. Operation of an ITER relevant inspection robot on Tore Supra tokamak[J]. Fusion Engineering and Design, 2009, 84 (6): 220- 223. |
| 4 | 何强.面向托卡马克腔第一壁维护的遥操作机械臂机构设计及分析[D].上海:上海交通大学, 2013: 9-15. |
| HE Qiang. Mechanism design and analysis of teleoperated manipulator for the maintenance of Tokamak first wall[D]. Shanghai: Shanghai Jiao Tong University, 2013: 9-15. | |
| 5 | 肖锡臻.面向托卡马克维护的多视觉遥操作机器人环境感知技术研究[D].沈阳:中国科学院沈阳自动化研究所, 2015: 11-40. |
| XIAO Xizhen. Research on environmental perception for tele-operation maintenance of Tokamak using multi-vision approach[D]. Shenyang: Shenyang Institute of Automation Chinese Academy of Sciences, 2015: 11-40. | |
| 6 | HAIST B , MILLS S , LOVING A . Remote handling preparations for JET EP2 shutdown[J]. Fusion Engineering and Design, 2009, 84 (6): 875- 879. |
| 7 | DAMIANI C , ANNINO C , BALAGUE S , et al. The European contribution to the ITER remote maintenance[J]. Fusion Engineering and Design, 2014, 89 (10): 2251- 2256. |
| 8 | LI Zhang, ZANG Xizhe, SUO Laichun, et al. Static analysis and modal analysis of heavy-load manipulator based on ANSYS[C]//Proc of ICMECT 2014. Zurich, Switzerland: Trans Tech Publications, 2014: 1059-1064. |
| 9 |
ZHANG Qiang , ZHOU Ling , WANG Zengfu . Design and implementation of wormlike creeping mobile robot for EAST remote maintenance system[J]. Fusion Engineering and Design, 2017, 118, 81- 97.
doi: 10.1016/j.fusengdes.2017.03.054 |
| 10 | 张强, 吴宝元, 郭伟斌, 等. 面向核聚变舱探测的遥操纵蛇形机器人系统[J]. 华中科技大学学报(自然科学版), 2017, 45 (10): 43- 48. |
| ZHANG Qiang , WU Baoyuan , GUO Weibin , et al. Snake-like remote control robot system for inboard detection of nuclear fusion vessel[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2017, 45 (10): 43- 48. | |
| 11 | 武遵.适用于核聚变反应舱的多关节机械臂关键技术研究[D].合肥:中国科学技术大学, 2016: 35-37. |
| WU Zun. Study on key technology of multi-joint manipulator for vessel of fusion device[D]. Hefei: University of Science and Technology of China, 2016: 35-37. | |
| 12 | 王美玲.面向救援任务的双臂机器人协作运动规划与控制方法研究[D].合肥:中国科学技术大学, 2015: 65-85. |
| WANG Meiling. Research on cooperative motion planning and control of a redundant dual-arm robot for rescuing tasks[D]. Hefei: University of Science and Technology of China, 2015: 65-85. | |
| 13 | 张强.多关节核环境移动机器人平台的机构设计与实现[D].合肥:中国科学技术大学, 2017: 115-119. |
| ZHANG Qiang. Mechanism design and implementation of multi-joint mobile robot platform for nuclear environment[D]. Hefei: University of Science and Technology of China, 2017: 115-119. | |
| 14 |
徐文福, 强文义, 李成, 等. 自由漂浮空间机器人路径规划研究进展[J]. 哈尔滨工业大学学报, 2009, 41 (11): 1- 12.
doi: 10.3321/j.issn:0367-6234.2009.11.001 |
|
XU Wenfu , QIANG Wenyi , LI Cheng , et al. Research progress of path planning for free floating space robots[J]. Journal of Harbin Institute of Technology, 2009, 41 (11): 1- 12.
doi: 10.3321/j.issn:0367-6234.2009.11.001 |
|
| 15 | ALI A A , RASHID A T , FRASCA M , et al. An algorithm for multi-robot collision-free navigation based on shortest distance[J]. Robotics and Autonomous Systems, 2016, 75 (1): 119- 128. |
| 16 |
ZHANG Yong , GONG Dunwei , ZHANG Jianhua . Robot path planning in uncertain environment using multi-objective particle swarm optimization[J]. Neurocomputing, 2013, 103, 172- 185.
doi: 10.1016/j.neucom.2012.09.019 |
| 17 |
YANG Yang , SONG Yuntao , PAN Hongtao , et al. Visual servo simulation of EAST articulated maintenance arm robot[J]. Fusion Engineering and Design, 2016, 104, 28- 33.
doi: 10.1016/j.fusengdes.2016.01.024 |
| 18 |
PANFILOV P B , KOROLEV S V . Integration of 3D dynamic models being created by 3D machine vision system into telerobotics applications[J]. Automation and Remote Control, 2011, 72 (5): 1102- 1113.
doi: 10.1134/S0005117911050195 |
| 19 | VIDILINA O V, VOROPAEVA N V. Reduction of flexible joint manipulator mathematical model[C]// Proc of MM-ITNT 2017. Nordrhein-Westfalen, Germany: CEUR-WS.org, 2017: 249-253. |
| 20 | 王琨, 骆敏舟, 曹毅, 等. 基于多变量预测补偿的机械臂精度提升方法[J]. 电子测量与仪器学报, 2014, 28 (11): 1213- 1221. |
| WANG Kun , LUO Minzhou , CAO Yi , et al. Promoting method for manipulator accuracy based on multi-variable prediction and compensation[J]. Journal of Electronic Measurement and Instrument, 2014, 28 (11): 1213- 1221. |
| [1] | 严宣辉, 肖国宝*. 基于定长实数路径编码机制的移动机器人路径规划[J]. 山东大学学报(工学版), 2012, 42(1): 59-65. |
| [2] | 刘彬,张仁津. 一种采用两段粒子群优化的路径规划方法[J]. 山东大学学报(工学版), 2012, 42(1): 12-18. |
| [3] | 陈明志1,许春耀2,陈健2,余轮2. 基于语义信息的虚拟环境路径规划[J]. 山东大学学报(工学版), 2011, 41(4): 106-112. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 765
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 2209
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Cited |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
| Shared | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Discussed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|