[2]
ILGEN Elke , KARFICH Natascga , LEVSEN Karsten , et al . Aromatic hydrocarbons in the atmospheric enviro-nment: part I: indoor versus outdoor sources, the influence of traffic
[J]. Atmospheric Environment , 2001 , 35 (7 ): 1235 - 1252 .
DOI:10.1016/S1352-2310(00)00388-5
[本文引用: 1]
[3]
CADENA Cesar , CARLONE Luca , CARRILLO Henry , et al . Past, present, and future of simultaneous localization and mapping: toward the robust-perception age
[J]. IEEE Transactions on Robotics , 2016 , 32 (6 ): 1309 - 1332 .
DOI:10.1109/TRO.2016.2624754
[本文引用: 2]
[4]
周彦 , 李雅芳 , 王冬丽 , 等 . 视觉同时定位与地图创建综述
[J]. 智能系统学报 , 2018 , 13 (1 ): 97 - 106 .
DOI:10.11992/tis.201703006
[本文引用: 1]
ZHOU Yan , LI Yafang , WANG Dongli , et al . Overview of visual simultaneous positioning with map creation
[J]. Journal of Intelligent Systems , 2018 , 13 (1 ): 97 - 106 .
DOI:10.11992/tis.201703006
[本文引用: 1]
[6]
曹风魁 , 庄严 , 闫飞 , 等 . 移动机器人长期自主环境适应研究进展和展望
[J]. 自动化学报 , 2020 , 46 (2 ): 205 - 221 .
URL
[本文引用: 1]
CAO Fengkui , ZHUANG Yan , YAN Fei , et al . Research progress and prospect of long-term autonomous environmental adaptation of mobile robots
[J]. Acta Automatica Sinica , 2020 , 46 (2 ): 205 - 221 .
URL
[本文引用: 1]
[7]
祝朝政 , 何明 , 杨晟 , 等 . 单目视觉里程计研究综述
[J]. 计算机工程与应用 , 2018 , 54 (7 ): 20 - 28 .
DOI:10.3778/j.issn.1002-8331.1712-0279
[本文引用: 1]
ZHU Chaozheng , HE Ming , YANG Sheng , et al . A review of monocular vision odometer research
[J]. Computer Engineering and Applications , 2018 , 54 (7 ): 20 - 28 .
DOI:10.3778/j.issn.1002-8331.1712-0279
[本文引用: 1]
[8]
谭静 , 赵健康 , 崔超 . 基于双目视觉与IMU的组合导航算法
[J]. 计算机工程与设计 , 2021 , 42 (2 ): 442 - 448 .
[本文引用: 1]
TAN Jing , ZHAO Jiankang , CUI Chao . Integrated navigation algorithm based on binocular vision and IMU
[J]. Computer Engineering and Design , 2021 , 42 (2 ): 442 - 448 .
[本文引用: 1]
[9]
ESSMAEEL Kyis, GALLO Luigi, DAMIANI Ernesto, et al. Temporal denoising of kinect depth data[C]//Proceedings of 8th International Conference on Signal Image Technology & Internet Based Systems. Sorrento, Italy: IEEE, 2013: 47-52.
URL
[本文引用: 1]
[10]
LIAO Ziwei , WANG Wei , QI Xianyu , et al . RGBD object SLAM using quadrics for indoor environments
[J]. Sensors , 2020 , 20 (18 ): 1 - 34 .
DOI:10.1109/JSEN.2020.3014328
[本文引用: 1]
[11]
HENRY Peter , KRAININ Michael , HERBST Evan , et al . RGBD mapping: using depth cameras for dense 3D modeling of indoor environments
[J]. The International Journal of Robotics Research , 2012 , 31 (5 ): 647 - 663 .
DOI:10.1177/0278364911434148
[本文引用: 1]
[12]
DRYANOVSKI Ivan, VALENTI Roberto G, XIAO Jizhong. Fast visual odometry and mapping from RGBD data[C]//Proceedings of 2013 IEEE International Conference on Robotics and Automation. Karlsruhe, Germany: IEEE, 2013: 2305-2310.
URL
[本文引用: 1]
[13]
杨明 , 王宏 , 何克忠 , 等 . 基于激光雷达的移动机器人环境建模与避障
[J]. 清华大学学报(自然科学版) , 2000 , 40 (7 ): 112 - 116 .
DOI:10.3321/j.issn:1000-0054.2000.07.030
[本文引用: 1]
YANG Ming , WANG Hong , HE Kezhong , et al . Environment modeling and obstacle avoidance of mobile robot based on LiDAR
[J]. Journal of Tsinghua University (Natural Science) , 2000 , 40 (7 ): 112 - 116 .
DOI:10.3321/j.issn:1000-0054.2000.07.030
[本文引用: 1]
[14]
WU Jianqing, XU Hao, ZHENG Jianying. Automatic background filtering and lane identification with roadside LiDAR data[C]//Proceedings of 2017 IEEE 20th International Conference on Intelligent Transportation Systems. Yokohama, Japan: IEEE, 2017: 6.
[本文引用: 1]
[15]
PATERNAIN Santiago , TAILANIAN Matias , CANETTI Rafael . Calibration of an inertial measurement unit
[J]. International Applied Mechanics , 2017 , 53 (2 ): 1 - 6 .
[本文引用: 1]
[16]
秦志斌 , 王慧娟 . 智慧高速毫米波雷达应用浅析
[J]. 中国交通信息化 , 2021 , (3 ): 130 - 131 .
[本文引用: 1]
QIN Zhibin , WANG Huijuan . Application analysis of intelligent high speed millimeter wave radar
[J]. Traffic Informatization in China , 2021 , (3 ): 130 - 131 .
[本文引用: 1]
[19]
张本法 , 孟祥萍 , 岳华 . 移动机器人定位方法概述
[J]. 山东工业技术 , 2014 , (22 ): 250 .
URL
[本文引用: 2]
ZHANG Benfa , MENG Xiangping , YUE Hua . Overview of localization methods for mobile robots
[J]. Shandong Industrial Technology , 2014 , (22 ): 250 .
URL
[本文引用: 2]
[20]
高云峰 , 周伦 , 吕明睿 , 等 . 自主移动机器人室内定位方法研究综述
[J]. 传感器与微系统 , 2013 , 32 (12 ): 1 - 5 .
DOI:10.3969/j.issn.1000-9787.2013.12.001
[本文引用: 2]
GAO Yunfeng , ZHOU Lun , LV Mingrui , et al . A review of indoor positioning methods forautonomous mobile robots
[J]. Sensors and Microsystems , 2013 , 32 (12 ): 1 - 5 .
DOI:10.3969/j.issn.1000-9787.2013.12.001
[本文引用: 2]
[22]
MEINLSCHMIDT Thomas, ASCHEMANN Harald, BUTT Saif. Cascaded backstepping control of a Duocopter including disturbance compensation by unscented Kalman filtering[C]// Proceedings of 2014 Inter-national Conference on Control, Decision and Information Technologies. Metz, France: IEEE, 2014: 315-320.
URL
[本文引用: 1]
[23]
中国科学院电子学研究所 , 中国科学院文献情报中心 . 自动化技术、计算机技术
[J]. 中国无线电电子学文摘 , 2011 , 27 (1 ): 161 - 238 .
URL
[本文引用: 1]
Institute of Electronics, Chinese Academy of Sciences , Literature and Information Center of Chinese Academy of Sciences . Automation technology, computer technology
[J]. China Radio Electronics Abstracts , 2011 , 27 (1 ): 161 - 238 .
URL
[本文引用: 1]
[24]
熊敏君 , 卢惠民 , 熊丹 , 等 . 基于单目视觉与惯导融合的无人机位姿估计
[J]. 计算机应用 , 2017 , 37 (增刊2 ): 127 - 133 .
URL
[本文引用: 1]
XIONG Minjun , LU Huimin , XIONG Dan , et al . UAV pose estimation based on monocular vision and inertial navigation fusion
[J]. Computer Application , 2017 , 37 (Suppl. 2 ): 127 - 133 .
URL
[本文引用: 1]
[26]
KIMURA Aritoshi, ARIZONO Ikuo, OHTA Hiroshi. A back-propagation algorithm based on the extended Kalman filter[C]//Proceedings of 1993 International Joint Conference on Neural Networks. Nagoya, Japan: IJC, 1993: 1669-1672.
[本文引用: 1]
[27]
SMITH Randall , SELF Matthew , CHEESEMAN Peter . Estimating uncertain spatial relationships in robotics
[J]. Machine Intelligence & Pattern Recognition , 1988 , 5 (5 ): 435 - 461 .
[本文引用: 1]
[28]
YAVUZ Slrma, KURT Zeyneb, BICER M Serdar. Simultaneous localization and mapping using extended Kalman filter[C]//Proceedings of 2009 IEEE 17th Signal Processing and Communications Applications Conference. Antalya, Turkey: IEEE, 2009: 7000-7033.
[本文引用: 1]
[30]
付强 , 张宏静 , 赵建伟 , 等 . 移动机器人SLAM改进算法的分析与实现
[J]. 兵工自动化 , 2018 , 37 (9 ): 86 - 89 .
DOI:10.7690/bgzdh.2018.09.021
[本文引用: 1]
FU Qiang , ZHANG Hongjing , ZHAO Jianwei , et al . Analysis and implementation of improved SLAM algorithm for mobile robots
[J]. Ordnance Automation , 2018 , 37 (9 ): 86 - 89 .
DOI:10.7690/bgzdh.2018.09.021
[本文引用: 1]
[31]
刘沛丰 , 王坚 . 一种基于抗差EKF的移动机器人定位技术
[J]. 计算机科学 , 2017 , 44 (增刊1 ): 115 - 118 .
URL
[本文引用: 1]
LIU Peifeng , WANG Jian . A mobile robot localization technology based on robust EKF
[J]. Computer Science , 2017 , 44 (Suppl.1 ): 115 - 118 .
URL
[本文引用: 1]
[32]
程璐 , 黄宜庆 . 基于Cholesky分解的改进自适应EKF-SLAM算法
[J]. 安徽工程大学学报 , 2020 , 35 (2 ): 11 - 20 .
URL
[本文引用: 1]
CHENG Lu , HUANG Yiqing . Improved adaptive EKF-SLAM algorithm based on cholesky decomposition
[J]. Journal of Anhui Engineering University , 2020 , 35 (2 ): 11 - 20 .
URL
[本文引用: 1]
[33]
CHATTERJEE Amitava , MATSUNO Fumitoshi . A neuro-fuzzy assisted extended Kalman filter-based approach for simultaneous localization and mapping (SLAM) problems
[J]. IEEE Transactions on Fuzzy Systems , 2007 , 15 (5 ): 984 - 997 .
DOI:10.1109/TFUZZ.2007.894972
[本文引用: 1]
[34]
PIGA Nicola A. , BOTTAREL Fabrizio , FANTACCI Claudio . MaskUKF: an instance segmentation aided unscented Kalman filter for 6D object pose and velocitytracking
[J]. Frontiers in Robotics and AI , 2021 , 8 (38 ): 1 - 17 .
URL
[本文引用: 1]
[35]
孙海波 , 童紫原 , 唐守锋 , 等 . 基于卡尔曼滤波与粒子滤波的SLAM研究综述
[J]. 软件导刊 , 2018 , 17 (12 ): 1 - 3 .
URL
[本文引用: 1]
SUN Haibo , TONG Ziyuan , TANG Shoufeng , et al . Review of SLAM research based on Kalman filter and particle filter
[J]. Software Guide , 2018 , 17 (12 ): 1 - 3 .
URL
[本文引用: 1]
[36]
LIU Qin , LIU Zheng , LIU Yunfo . Nonorthogonal problem in iterated unscented Kalman filter for passive tracking
[J]. IEEE Transactions on Electrical and Electronic Engineering , 2013 , 8 (4 ): 415 - 419 .
DOI:10.1002/tee.21873
[本文引用: 1]
[37]
CHEN Yunqiang, HUANG Thomas, RUI Yong. Parametric contour tracking using unscented Kalmanfilter[C]//Proceedings of 2002 International Conference on Image Processing: Vol Ⅲ. Beijing: IEEE, 2002: 613-616.
[本文引用: 1]
[39]
QI Ming. An improved particle filter SLAM algorithm for AGVs[C]//Proceedings of 20 IEEE 6th Int-ernational Conference on Control Science and Systems Engineering. Beijing: IEEE, 2020: 27-31.
[本文引用: 1]
[40]
GORDON N J , SALMONDD J , SMITHA F M . Novel-approach to nonlinear non-gaussian Bayesian state estimation
[J]. IEEE Proceedings: F Radar and Signal Processing , 1993 , 140 (2 ): 107 - 113 .
DOI:10.1049/ip-f-2.1993.0015
[本文引用: 1]
[41]
周武 , 赵春霞 . 一种改进的边缘粒子滤波slam方法
[J]. 华中科技大学学报(自然科学版) , 2008 , (增刊1 ): 181 - 185 .
URL
[本文引用: 1]
ZHOU Wu , ZHAO Chunxia . An improved edge particle filtering SLAM method
[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition) , 2008 , (Suppl.1 ): 181 - 185 .
URL
[本文引用: 1]
[42]
吴培良 , 孔亮 , 段亮亮 , 等 . 一种基于提议分布选择的改进边缘粒子滤波算法
[J]. 小型微型计算机系统 , 2016 , 37 (2 ): 381 - 384 .
DOI:10.3969/j.issn.1000-1220.2016.02.036
[本文引用: 1]
WU Peiliang , KONG Liang , DUAN Liangliang , et al . An improved edge particle filtering algorithm based on proposed distribution selection
[J]. Journal of Small and Micro Computer Systems , 2016 , 37 (2 ): 381 - 384 .
DOI:10.3969/j.issn.1000-1220.2016.02.036
[本文引用: 1]
[43]
DELLAERT Frank, FOX Dieter, BURGARD Wolfram, et al. Monte Carlo localization for mobile robots[C]//Proceedings of 1999 IEEE International Conference on Robotics and Automation. New York, USA: IEEE, 1999: 1322-1328.
[本文引用: 1]
[45]
武斌 , 田清 . 改进无迹粒子滤波的室内移动目标定位
[J]. 传感器与微系统 , 2021 , 40 (3 ): 153 - 156 .
URL
[本文引用: 1]
WU Bin , TIAN Qing . Indoor moving target localization algorithm based on improved untraceable particle filtering
[J]. Transducers and Microsystems , 2021 , 40 (3 ): 153 - 156 .
URL
[本文引用: 1]
[46]
MONTEMERLO Michael, THRUN Sebastian. Simultaneous localization and mapping with unknown data association using Fast SLAM[C]//Proceedings of 2003 IEEE International Conference on Robotics and Automation. Taipei, China: IEEE, 2003: 1985-1991.
URL
[本文引用: 1]
[47]
THRUN Sebastian, MONTEMARLO Michael, KOLLER Daphne, et al. Fast SLAM: a factored solution to the simultaneous localization and mapping problem[C]//Proceedings of AAAI National Conference on Artificial Intelligence. Edmonton, Canada: IEEE, 2002: 240-248.
[本文引用: 1]
[48]
BEESON Patrick , MODAYIL Joseph , KUIPERS Benjamin . Factoring the apping problem: mobile robot map-building in the hybrid spatial semantic hierarchy
[J]. International Journal of Robotics Research , 2010 , 29 (4 ): 428 - 459 .
DOI:10.1177/0278364909100586
[本文引用: 1]
[50]
KOLHATKAR Chinmay, WAGLE Kranti. Review of SLAM algorithms for indoor mobile robot with LIDAR and RGBD camera technology[C]//Proceedings of ICEEE 2020. Antalya, Turkey: IEEE, 2021: 397-409.
URL
[本文引用: 1]
[51]
李万莉 , 王文佳 . 基于Hough变换的激光几何特征地图提取方法
[J]. 机电一体化 , 2018 , 24 (7 ): 3 - 7 .
URL
[本文引用: 1]
LI Wanli , WANG Wenjia . Geometric feature map extraction for laser SLAM based on hough transform
[J]. Mechatronics , 2018 , 24 (7 ): 3 - 7 .
URL
[本文引用: 1]
[52]
ARSHAD Saba , KIM Gon-Woo . Role of deep learning in loop closure detection for visual and lidar SLAM: a survey
[J]. Sensors , 2021 , 21 (4 ): 17 .
URL
[本文引用: 1]
[53]
DINH Nam, KIM Gon-Woo. Solid-state LiDAR based-SLAM: a concise review and application[C]//Proceedings of 2021 IEEE International Conference on Big Data and Smart Computing. Jeju, Korea: IEEE, 2021: 302-305.
URL
[本文引用: 1]
[54]
NUTZI Gabriel , WEISS Stephan , SCARAMUZZA Davide . Fusion of IMU and vision for absolute scale estimation in monocular SLAM
[J]. Journal of Intelligent & Robotic Systems , 2011 , 61 (1/2/3/4 ): 287 - 299 .
URL
[本文引用: 1]
[55]
NIKOLIC Janosch, REHDER Joern, BURRI Michael. A synchronized visual-inertial sensor system with FPGA pre-processing for accurate real-time SLAM[C]//Proceedings of 2014 IEEE International Conference on Robotics and Automation. Hong Kong, China: IEEE, 2014: 431-437.
URL
[56]
CONCHA Alejo, LOIANNO Giuseppe, KUMAR Vijay, et al. Visual-inertial direct SLAM[C]//Proceedings of 2016 IEEE International Conference on Robotics and Automation. Stockholm, Sweden: IEEE, 2016: 1331-1338.
URL
[57]
RAUL Mur-Artal , TARDOS Juan D . Visual-inertial monocular SLAM with map reuse
[J]. IEEE Robotics and Automation Letters , 2017 , 2 (2 ): 796 - 803 .
DOI:10.1109/LRA.2017.2653359
[58]
QIN Tong, LI Peiliang, SHEN Shaojie. Relocalization, global optimization and map merging for monocular visual-inertial SLAM[C]//Proceedings of 2018 IEEE International Conference on Robotics and Automation. Brisbane, Australia: IEEE, 2018: 1197-1204.
URL
[本文引用: 1]
[59]
潘林豪 , 田福庆 , 应文健 , 等 . 融合双目视觉与惯导信息的高效视觉里程计算法
[J]. 计算机应用研究 , 2021 , 38 (6 ): 1739 - 1743 .
DOI:10.19734/j.issn.1001-3695.2020.08.0188
[本文引用: 1]
PAN Linhao , TIAN Fuqing , YING Wenjian , et al . An efficient vision odometry method based on binocular vision and IMU information
[J]. Application Research of Computers , 2021 , 38 (6 ): 1739 - 1743 .
DOI:10.19734/j.issn.1001-3695.2020.08.0188
[本文引用: 1]
[60]
种一帆 , 冀杰 , 宫铭钱 , 等 . 半直接法与IMU融合的双目视觉里程计
[J]. 西南师范大学学报(自然科学版) , 2021 , 46 (2 ): 112 - 120 .
[本文引用: 1]
ZHONG Yifan , JI Jie , GONG Mingqian , et al . Binocular vision odometer with semi-direct method and IMU fusion
[J]. Journal of Southwest Normal University (Natural Science Edition) , 2021 , 46 (2 ): 112 - 120 .
[本文引用: 1]
[61]
BLOESCH Michael, OMARI Sammy, HUTTER Marco, et al. Robust visual inertial odometry using a direct EKF-based approach[C]//Proceedings of 2015 IEEE/RSI International Conference on Intelligent Robots and Systems. Hamburg, Germany: IEEE, 2015: 298-304.
URL
[本文引用: 1]
[62]
SCHNEIDER Thomas, DYMCZYK Marcin, FEHR Marius, et al. Maplab: an open framework for research in visual-inertial mapping and localization[J]. 2017, 3(3): 1418-1425.
URL
[本文引用: 1]
[63]
慈文彦 , 黄影平 , 胡兴 . 视觉里程计算法研究综述
[J]. 计算机应用研究 , 2019 , 36 (9 ): 2561 - 2568 .
URL
[本文引用: 2]
CI Wenyan , HUANG Yingping , HU Xing . Review of visual mileage calculation
[J]. Application Research of Computers , 2019 , 36 (9 ): 2561 - 2568 .
URL
[本文引用: 2]
[64]
YE Haoyang, CHEN Yuying, LIU Ming. Tightly coupled 3D Lidar inertial odometry and mapping[C]//Proceedings of the 2019 International Conference on Robotics and Automation. Montreal, Canada: ICRA, 2019: 3144-3150.
[本文引用: 1]
[65]
庞帆 , 危双丰 , 师现杰 , 等 . 激光雷达惯导耦合的里程计与建图方法
[J]. 计算机应用研究 , 2021 , 38 (6 ): 1 - 7 .
URL
[本文引用: 1]
PANG Fan , WEI Shuangfeng , SHI Xianjie , et al . Odometer and mapping method for lidar inertial navigation coupling
[J]. Computer Application Research , 2021 , 38 (6 ): 1 - 7 .
URL
[本文引用: 1]
[66]
张艳国 , 李擎 . 基于惯性测量单元的激光雷达点云融合方法
[J]. 系统仿真学报 , 2018 , 30 (11 ): 4334 - 4339 .
URL
[本文引用: 1]
ZHANG Yanguo , LI Qing . LiDAR point cloud fusion method based on inertial measurement unit
[J]. Journal of System Simulation , 2018 , 30 (11 ): 4334 - 4339 .
URL
[本文引用: 1]
[67]
GENEVA Patrick, ECKENHOFF Kevin, YANG Yulin, et al. LIPS: LiDAR-inertial 3D plane SLAM[C]//Proceedings of 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid, Spain: IEEE, 2018: 123-130.
[本文引用: 1]
[68]
LV Bin , XU Hao , WU Jianqing , et al . Revolution and rotation-based method for roadside LiDAR data integration
[J]. Optics & Laser Technology , 2019 , 119 , 105571 .
URL
[本文引用: 1]
[69]
WU Jianqing , XU Hao , LIU Wei . Points registration for roadside LiDAR sensors
[J]. Transportation Research Record , 2019 , 2673 (9 ): 627 - 639 .
DOI:10.1177/0361198119843855
[70]
YUE Rui , XU Hao , WU Jianqing , et al . Data registration with ground points for roadside LiDAR sensors
[J]. Remote Sensing , 2019 , 11 (11 ): 16 .
[本文引用: 1]
[71]
NEWMAN P, COLE D, HO K. Outdoor SLAM using visual appearance and laser ranging[C]//Proceedings of 2006 IEEE International Conference on Robotics and Automation. Orlando, USA: IEEE, 2006: 1180-1187.
URL
[本文引用: 1]
[72]
LIN Kuenhan , CHANG Chunhua , DOPFER Andreas , et al . Mapping and localization in 3D environments using a 2D laser scanner and a stereo camera
[J]. Journal of Information Science and Engineering , 2012 , 28 (1 ): 131 - 144 .
[73]
WEN Chenglu , QIN Ling , ZHU Qingyuan , et al . Three-dimensional indoor mobile mapping with fusion of two-dimensional laser scanner and RGBD camera data
[J]. IEEE Geoscience and Remote Sensing Letters , 2014 , 11 (4 ): 843 - 847 .
DOI:10.1109/LGRS.2013.2279872
[74]
SHIN Y S, PARK Y S, KIM Ayoung. Direct visual SLAM using sparse depth for camera-LiDAR system[C]// Proceedings of 2018 IEEE International Conference on Robotics and Automation. Brisbane, Australia: IEEE, 2018: 5144-5151.
URL
[本文引用: 1]
[76]
CHEN Mengxiao, YANG Shaowu, YI Xiaodong, et al. Real-time 3D mapping using a 2D laser scanner and IMU-aided visual SLAM[C]//Proceedings of the 2017 IEEE International Conference on Real-time Computing and Robotics. Okinawa, Japan: IEEE, 2017: 207-302.
URL
[本文引用: 1]
[77]
HUANG Kaihong, STACHNISS Cyrill. Joint ego-motion estimation using a laser scanner and a monocular camera through relative orientation estimation and 1-DoF ICP[C]//Proceedings of 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid, Spain: IEEE, 2018: 671-676.
URL
[本文引用: 1]
[78]
DING Xiaqing, WANG Yue, LI Dongxuan, et al. Laser map aided visual inertial localization in changing environment[C]// Proceedings of 25th IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid, Spain: IEEE, 2018: 4794-4801.
[本文引用: 1]
[80]
肖军浩 , 施成浩 , 黄开宏 , 等 . 单目相机-3维激光雷达的外参标定及融合里程计研究
[J]. 机器人 , 2021 , 43 (1 ): 17 - 28 .
DOI:10.13973/j.cnki.robot.200030
[本文引用: 1]
XIAO Junhao , SHI Chenghao , HUANG Kaihong , et al . Study on external reference calibration and fusion odometer of monocular camera-3D lidar
[J]. The Robot , 2021 , 43 (1 ): 17 - 28 .
DOI:10.13973/j.cnki.robot.200030
[本文引用: 1]
[81]
郭安 , 周洲 , 祝小平 , 等 . 基于EKF算法的太阳能无人机低成本飞控状态估计
[J]. 控制与决策 , 2020 , 35 (10 ): 2415 - 2423 .
DOI:10.13195/j.kzyjc.2019.0091
[本文引用: 1]
GUO An , ZHOU Zhou , ZHU Xiaoping , et al . Low-cost flight control state estimation of solar unmanned aerial vehicle based on EKF algorithm
[J]. Control and Decision Making , 2020 , 35 (10 ): 2415 - 2423 .
DOI:10.13195/j.kzyjc.2019.0091
[本文引用: 1]
[83]
崔巍杰. 毫米波和激光雷达数据融合的SLAM算法研究[D]. 成都: 电子科技大学机械工程系, 2019.
URL
[本文引用: 1]
CUI Weijie. SLAM algorithm for millimeter wave and LiDAR data fusion[D]. Chengdu: Department of Mechanical, Engineering University of Electronic Science and Technology, 2019.
URL
[本文引用: 1]
[84]
王泽华 , 梁冬泰 , 梁丹 , 等 . 基于惯性/磁力传感器与单目视觉融合的slam方法
[J]. 机器人 , 2018 , 40 (6 ): 933 - 941 .
URL
[本文引用: 1]
WANG Zehua , LIANG Dongtai , LIANG Dan , et al . SLAM method based on inertial/magnetic sensor and monocular vision fusion
[J]. The Robot , 2018 , 40 (6 ): 933 - 941 .
URL
[本文引用: 1]
[85]
HERTZBERG Christoph , WAGNER Rene , FRESE UdO , et al . Integrating generic sensor fusion algorithms with sound state representations through encapsulation of manifolds
[J]. Information Fusion , 2011 , 14 (1 ): 57 - 77 .
URL
[本文引用: 1]
[86]
KO N Y , YOUN Wonkeun , CHOI I H , et al . Features of invariant extended Kalman filter applied to unmanned aerial vehicle navigation
[J]. Sensors , 2018 , 18 (9 ): 2855 .
DOI:10.3390/s28092855
[本文引用: 1]
[87]
陈梦园, 任玥. 环境感知传感器在车辆智能化中的应用[C]//重庆汽车工程学会2019年论文汇编. 重庆: 重庆汽车工程学会, 2019: 33-38.
[本文引用: 1]
CHEN Mengyuan, REN Yue. Application of environmental sensing sensor in vehicle intelligence[C]//Proceedings of Chongqing Automotive Engineering Society. Chongqing: CAES, 2019: 33-38.
[本文引用: 1]
[89]
李小玲 . SLAM问题中的数据关联方法研究
[J]. 计算机产品与流通 , 2019 , (8 ): 114 .
URL
[本文引用: 2]
LI Xiaoling . Research on data association method for SLAM problem
[J]. Computer Products & Circulation , 2019 , (8 ): 114 .
URL
[本文引用: 2]
[90]
BAR-SHALOM Yaakov , DAUM Fred , HUANG Jim . The probabilistic data association filter
[J]. IEEE Control Systems , 2010 , 29 (6 ): 82 - 100 .
URL
[本文引用: 1]
[91]
BAILEY T, NEBOT E M, ROSENBLATT J K, et al. Data association for mobile robot navigation: a graph theoretic approach[C]//Proceedings of IEEE Int-ernational Conference on Robotics and Automation. San Francisco, USA: IEEE, 2000: 2512-2517.
[本文引用: 1]
[92]
张铁 . 移动机器人里程计系统误差的校正方法
[J]. 华南理工大学学报(自然科学版) , 2014 , 42 (9 ): 7 - 11 .
URL
[本文引用: 1]
ZHANG Tie . Calibration method of mobile robot odometer system error
[J]. Journal of South China University of Technology (Natural Science Edition) , 2014 , 42 (9 ): 7 - 11 .
URL
[本文引用: 1]
[93]
余宇 , 胡峰 . 基于深度学习的视觉SLAM回环检测方法
[J]. 计算机工程与设计 , 2020 , 41 (2 ): 529 - 536 .
[本文引用: 1]
YU Yu , HU Feng . A Loop detection method for visual SLAM based on deep learning
[J]. Computer Engineering and Design , 2020 , 41 (2 ): 529 - 536 .
[本文引用: 1]
[94]
房立金 , 刘博 , 万应才 . 基于深度学习的动态场景语SLAM
[J]. 华中科技大学学报(自然科学版) , 2020 , 48 (1 ): 121 - 126 .
URL
FANG Lijin , LIU Bo , WAN Yingcai . Semantic SLAM for dynamic scenes based on deep learning
[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition) , 2020 , 48 (1 ): 121 - 126 .
URL
[95]
张凯 , 阳杰 . 深度学习下的视觉SLAM回环检测及其算法
[J]. 微处理机 , 2021 , 42 (1 ): 43 - 46 .
URL
ZHANG Kai , YANG Jie . Loop detection and algorithm for visual SLAM based on deep learning
[J]. Microprocessor , 2021 , 42 (1 ): 43 - 46 .
URL
[96]
张国栋 . 基于深度学习的视觉SLAM系统
[J]. 电子制作 , 2019 , (1 ): 62 - 64 .
URL
[本文引用: 1]
ZHANG Guodong . A visual SLAM system based on deep learning
[J]. Electronic Manufacturing , 2019 , (1 ): 62 - 64 .
URL
[本文引用: 1]
[97]
LI Ruihao , WANG Sen , GU Dongbing . Deep SLAM: a robust monocular SLAM system with unsupervised deeplearning
[J]. IEEE Transactions on Industrial Electronics , 2021 , 68 (4 ): 3577 - 3587 .
DOI:10.1109/TIE.2020.2982096
[本文引用: 1]
[98]
LI Guangqiang , YU Lei , FEI Shumin . A deep-learning real-time visual SLAM system based on multi-task featureextraction network and self-supervised feature points
[J]. Measurement , 2021 , 168 (4/5 ): 108403 .
URL
[本文引用: 1]
[99]
MEMON A R , WANG Hesheng , HUSSAINAbid . Loop closure detection using supervised and unsupervised deepneural networks for monocular SLAM systems
[J]. Robotics and Autonomous Systems , 2020 , 126 , 103470 .
DOI:10.1016/j.robot.2020.103470
[本文引用: 1]
[100]
ZHAO Xinyang , WANG Changhong , ANG M H . Real-time visual-inertial localization using semanticsegmentation towards dynamic environments
[J]. IEEE Access , 2020 , 8 , 155047 - 155059 .
DOI:10.1109/ACCESS.2020.3018557
[本文引用: 1]
[101]
MANSOUR Mostafa , DAVIDSON Pavel , STEPANOV Oleg . Towards semantic SLAM: 3D position and velocity estimation by fusing image semantic information with camera motion parameters for traffic scene analysis
[J]. Remote Sensing , 2021 , 13 (3 ): 17 .
[本文引用: 1]
[102]
吴凡 , 宗艳桃 , 汤霞清 . 视觉SLAM的研究现状与展望
[J]. 计算机应用研究 , 2020 , 37 (8 ): 2248 - 2254 .
URL
[本文引用: 1]
WU Fan, ZONG Yantao, TANG Xiaqing. Application Research of Computers [J]. 2020, 37(8): 2248-2254.
URL
[本文引用: 1]
[103]
KIM Hanme, LEUTENEGGER Stefan, DAVISONA J. Real-time 3D reconstruction and 6-DoF tracking with an event camera[C]//Proceedings of Computer Vision-Eccv 2016. Amsterdam, the Netherlands: ECCV, 2016: 349-364.
[本文引用: 1]
[104]
马艳阳 , 叶梓豪 , 刘坤华 , 等 . 基于事件相机的定位与建图算法: 综述
[J]. 自动化学报 , 2021 , 47 (7 ): 1484 - 1494 .
URL
[本文引用: 1]
MA Yanyang , YE Zihao , LIU Kunhua , et al . Event camera based localization and mapping algorithms: a review
[J]. Acta Automatica Sinica , 2021 , 47 (7 ): 1484 - 1494 .
URL
[本文引用: 1]
[105]
吴建清 , 宋修广 . 智慧公路关键技术发展综述
[J]. 山东大学学报(工学版) , 2020 , 50 (4 ): 52 - 69 .
URL
[本文引用: 1]
WU Jianqing , SONG Xiuguang . Review on smart highways critical technology
[J]. Journal of Shandong University (Engineering Science) , 2020 , 50 (4 ): 52 - 69 .
URL
[本文引用: 1]
我国"互联网+"交通服务的演进与政策
1
2016
... 交通运输作为拉动我国经济快速增长的重要领域, 其发展直接关系到国民生活水平及生活质量的提高.为响应我国大力推行智慧交通发展的号召, 无人驾驶技术逐渐成为近几年研究工作的热点[1 ] .支撑自动驾驶车辆安全行驶的一大关键技术便是定位, 目前使用GPS作为车辆定位的基础工具难以满足自动驾驶技术的需求.GPS存在易受大气环境影响、室内定位准确度低等限制, 仅靠其支撑车辆定位与导航技术容易出现误差[2 ] .道路基础设施作为一种参照物也可以应用于车辆定位技术, 比如车道标记及车辆探测器.最新的驾驶员辅助系统已经可以通过识别车道线和车道标记对车辆进行引导, 但该方法的使用场景极受限制[3 ] .当车辆行驶在道路标记较少的高动态复杂场景下, 仅靠识别道路标记难以实现高精度定位.因此, 需要一种能够实现车辆高精度定位与导航的方法.同步定位与建图技术(simultinous localization and mapping, SLAM)突破传统定位方法的局限, 能够实现车辆高精定位并构建动态更新地图, 提高了自动驾驶车辆行驶的轨迹精度与安全性. ...
我国"互联网+"交通服务的演进与政策
1
2016
... 交通运输作为拉动我国经济快速增长的重要领域, 其发展直接关系到国民生活水平及生活质量的提高.为响应我国大力推行智慧交通发展的号召, 无人驾驶技术逐渐成为近几年研究工作的热点[1 ] .支撑自动驾驶车辆安全行驶的一大关键技术便是定位, 目前使用GPS作为车辆定位的基础工具难以满足自动驾驶技术的需求.GPS存在易受大气环境影响、室内定位准确度低等限制, 仅靠其支撑车辆定位与导航技术容易出现误差[2 ] .道路基础设施作为一种参照物也可以应用于车辆定位技术, 比如车道标记及车辆探测器.最新的驾驶员辅助系统已经可以通过识别车道线和车道标记对车辆进行引导, 但该方法的使用场景极受限制[3 ] .当车辆行驶在道路标记较少的高动态复杂场景下, 仅靠识别道路标记难以实现高精度定位.因此, 需要一种能够实现车辆高精度定位与导航的方法.同步定位与建图技术(simultinous localization and mapping, SLAM)突破传统定位方法的局限, 能够实现车辆高精定位并构建动态更新地图, 提高了自动驾驶车辆行驶的轨迹精度与安全性. ...
Aromatic hydrocarbons in the atmospheric enviro-nment: part I: indoor versus outdoor sources, the influence of traffic
1
2001
... 交通运输作为拉动我国经济快速增长的重要领域, 其发展直接关系到国民生活水平及生活质量的提高.为响应我国大力推行智慧交通发展的号召, 无人驾驶技术逐渐成为近几年研究工作的热点[1 ] .支撑自动驾驶车辆安全行驶的一大关键技术便是定位, 目前使用GPS作为车辆定位的基础工具难以满足自动驾驶技术的需求.GPS存在易受大气环境影响、室内定位准确度低等限制, 仅靠其支撑车辆定位与导航技术容易出现误差[2 ] .道路基础设施作为一种参照物也可以应用于车辆定位技术, 比如车道标记及车辆探测器.最新的驾驶员辅助系统已经可以通过识别车道线和车道标记对车辆进行引导, 但该方法的使用场景极受限制[3 ] .当车辆行驶在道路标记较少的高动态复杂场景下, 仅靠识别道路标记难以实现高精度定位.因此, 需要一种能够实现车辆高精度定位与导航的方法.同步定位与建图技术(simultinous localization and mapping, SLAM)突破传统定位方法的局限, 能够实现车辆高精定位并构建动态更新地图, 提高了自动驾驶车辆行驶的轨迹精度与安全性. ...
Past, present, and future of simultaneous localization and mapping: toward the robust-perception age
2
2016
... 交通运输作为拉动我国经济快速增长的重要领域, 其发展直接关系到国民生活水平及生活质量的提高.为响应我国大力推行智慧交通发展的号召, 无人驾驶技术逐渐成为近几年研究工作的热点[1 ] .支撑自动驾驶车辆安全行驶的一大关键技术便是定位, 目前使用GPS作为车辆定位的基础工具难以满足自动驾驶技术的需求.GPS存在易受大气环境影响、室内定位准确度低等限制, 仅靠其支撑车辆定位与导航技术容易出现误差[2 ] .道路基础设施作为一种参照物也可以应用于车辆定位技术, 比如车道标记及车辆探测器.最新的驾驶员辅助系统已经可以通过识别车道线和车道标记对车辆进行引导, 但该方法的使用场景极受限制[3 ] .当车辆行驶在道路标记较少的高动态复杂场景下, 仅靠识别道路标记难以实现高精度定位.因此, 需要一种能够实现车辆高精度定位与导航的方法.同步定位与建图技术(simultinous localization and mapping, SLAM)突破传统定位方法的局限, 能够实现车辆高精定位并构建动态更新地图, 提高了自动驾驶车辆行驶的轨迹精度与安全性. ...
... 如图 2 所示, 早期的SLAM时代被称为传统时代, 通过扩展卡尔曼滤波、粒子滤波及最大似然估计等手段对SLAM问题进行求解, 依据SLAM基本框架对其收敛性进行验证; SLAM发展到第二阶段主要集中在算法分析, 针对SLAM的基本特性展开研究, 包括一致性、可观测性、稀疏性和收敛性; 第三阶段可以概括为预测性-鲁棒性时期, 基于已经优化的算法资源, 针对更高级别的场景进行环境感知, 定位与建图能力均得到进一步提升[3 ] . ...
视觉同时定位与地图创建综述
1
2018
... SLAM作为一种集成概念, 其系统由多个架构组成, 如图 1 所示, 包括传感器数据感知、前端、后端优化、回环检测与建图, 通过提取特征进行数据关联与状态估计, 实现状态及特征的及时更新[4 ] .这一概念最早于1986年由Smith Self和Cheeseman共同提出, 其发展历史已有30余年[5 ] . ...
视觉同时定位与地图创建综述
1
2018
... SLAM作为一种集成概念, 其系统由多个架构组成, 如图 1 所示, 包括传感器数据感知、前端、后端优化、回环检测与建图, 通过提取特征进行数据关联与状态估计, 实现状态及特征的及时更新[4 ] .这一概念最早于1986年由Smith Self和Cheeseman共同提出, 其发展历史已有30余年[5 ] . ...
中国交通工程学术研究综述·2016
1
2016
... SLAM作为一种集成概念, 其系统由多个架构组成, 如图 1 所示, 包括传感器数据感知、前端、后端优化、回环检测与建图, 通过提取特征进行数据关联与状态估计, 实现状态及特征的及时更新[4 ] .这一概念最早于1986年由Smith Self和Cheeseman共同提出, 其发展历史已有30余年[5 ] . ...
中国交通工程学术研究综述·2016
1
2016
... SLAM作为一种集成概念, 其系统由多个架构组成, 如图 1 所示, 包括传感器数据感知、前端、后端优化、回环检测与建图, 通过提取特征进行数据关联与状态估计, 实现状态及特征的及时更新[4 ] .这一概念最早于1986年由Smith Self和Cheeseman共同提出, 其发展历史已有30余年[5 ] . ...
移动机器人长期自主环境适应研究进展和展望
1
2020
... SLAM的关键技术是构建机器人在未知环境中的位姿与环境地图, 根据位姿与地图信息估计自身运动的位置并伴随运动过程构建增量式地图, 实现车辆自动寻航与避障功能.SLAM关注的核心问题在于怎样获得环境信息、怎样将环境信息可视化并根据环境信息更新地图、环境地图的表示方法, 即“我在哪”、“这是哪”及“我怎样到达指定地点”, SLAM正是为了解决这些核心问题所提出的多项技术的总和[6 ] . ...
移动机器人长期自主环境适应研究进展和展望
1
2020
... SLAM的关键技术是构建机器人在未知环境中的位姿与环境地图, 根据位姿与地图信息估计自身运动的位置并伴随运动过程构建增量式地图, 实现车辆自动寻航与避障功能.SLAM关注的核心问题在于怎样获得环境信息、怎样将环境信息可视化并根据环境信息更新地图、环境地图的表示方法, 即“我在哪”、“这是哪”及“我怎样到达指定地点”, SLAM正是为了解决这些核心问题所提出的多项技术的总和[6 ] . ...
单目视觉里程计研究综述
1
2018
... 单目相机是指使用单个相机来获取数据信息.使用单目相机的优点在于操作简单、成本较低, 因此单目相机的流行程度较高.由于单目相机无法采集到地图的实际尺度与机器人的运动轨迹, 便无法获得物体的绝对深度信息, 只能估计环境的相对深度信息[7 ] . ...
单目视觉里程计研究综述
1
2018
... 单目相机是指使用单个相机来获取数据信息.使用单目相机的优点在于操作简单、成本较低, 因此单目相机的流行程度较高.由于单目相机无法采集到地图的实际尺度与机器人的运动轨迹, 便无法获得物体的绝对深度信息, 只能估计环境的相对深度信息[7 ] . ...
基于双目视觉与IMU的组合导航算法
1
2021
... 双目相机一般由左眼相机和右眼相机水平放置构成, 即由2个单目相机组合而成.不同于单目相机, 双目相机在运动与静止状态下均可通过定标、校正、匹配与计算估计物体的深度信息.但其标定过程相对复杂、计算过程较为繁琐且计算负荷大[8 ] . ...
基于双目视觉与IMU的组合导航算法
1
2021
... 双目相机一般由左眼相机和右眼相机水平放置构成, 即由2个单目相机组合而成.不同于单目相机, 双目相机在运动与静止状态下均可通过定标、校正、匹配与计算估计物体的深度信息.但其标定过程相对复杂、计算过程较为繁琐且计算负荷大[8 ] . ...
1
... 深度相机能够获得物体的色彩与深度信息[9 ] .深度相机通常采用结构光或飞行时间法的物理方法获取信息, 其信息采集速度较单目相机与双目相机快, 采集的数据量也更丰富[10 ] .但深度相机受小视场角与低分辨率的限制, 目前主要用于室内定位与建图[11 -12 ] . ...
RGBD object SLAM using quadrics for indoor environments
1
2020
... 深度相机能够获得物体的色彩与深度信息[9 ] .深度相机通常采用结构光或飞行时间法的物理方法获取信息, 其信息采集速度较单目相机与双目相机快, 采集的数据量也更丰富[10 ] .但深度相机受小视场角与低分辨率的限制, 目前主要用于室内定位与建图[11 -12 ] . ...
RGBD mapping: using depth cameras for dense 3D modeling of indoor environments
1
2012
... 深度相机能够获得物体的色彩与深度信息[9 ] .深度相机通常采用结构光或飞行时间法的物理方法获取信息, 其信息采集速度较单目相机与双目相机快, 采集的数据量也更丰富[10 ] .但深度相机受小视场角与低分辨率的限制, 目前主要用于室内定位与建图[11 -12 ] . ...
1
... 深度相机能够获得物体的色彩与深度信息[9 ] .深度相机通常采用结构光或飞行时间法的物理方法获取信息, 其信息采集速度较单目相机与双目相机快, 采集的数据量也更丰富[10 ] .但深度相机受小视场角与低分辨率的限制, 目前主要用于室内定位与建图[11 -12 ] . ...
基于激光雷达的移动机器人环境建模与避障
1
2000
... 单线束激光雷达也称2D激光雷达, 主流2D激光雷达能够识别并扫描平面内的障碍物, 非常适用于平面运动的机器人进行自定位与建图[13 ] .由于2D激光雷达的扫描范围固定在平面内, 其数据因缺乏高度信息难以成像.因此, 2D激光雷达的使用范围较为受限, 常见于扫地机器人. ...
基于激光雷达的移动机器人环境建模与避障
1
2000
... 单线束激光雷达也称2D激光雷达, 主流2D激光雷达能够识别并扫描平面内的障碍物, 非常适用于平面运动的机器人进行自定位与建图[13 ] .由于2D激光雷达的扫描范围固定在平面内, 其数据因缺乏高度信息难以成像.因此, 2D激光雷达的使用范围较为受限, 常见于扫地机器人. ...
1
... 多线束激光雷达也称3D激光雷达, 3D激光雷达能够采集带有角度和距离的三维点云信息, 信息准确度更高且信息量更为丰富, 采集到的信息能够实时显示并按比例还原目标形状大小.激光雷达点云信息的数据处理与计算过程较图像更为简单.激光雷达相较于相机, 其最突出的一个特点就是不受光照的影响, 白天与黑夜的表现能力俱佳.但3D激光雷达易受天气影响, 穿透雨、灰尘等障碍物的能力较差, 其制作成本较单线束激光雷达也更昂贵[14 ] . ...
Calibration of an inertial measurement unit
1
2017
... 惯性测量单元(inertial measurement unit, IMU)能够测量物体的加速度与姿态角, 其高频的传输速率能够为先验位姿估计提供基础.IMU的工作原理是对加速度的积分、初始速度、位置进行叠加运算, 运算过程中易产生累积误差, 累积误差会随时间增加[15 ] .因此, IMU很少作为单一传感器支撑定位与建图功能, 常与相机或激光雷达配合使用. ...
智慧高速毫米波雷达应用浅析
1
2021
... 毫米波雷达能够测量物体的距离、方位角及多普勒速度, 同时毫米波雷达与激光雷达相比, 其对于雾、霾、灰尘等天气的穿透能力更强, 探测范围更广且价格便宜[16 ] .但毫米波雷达精度较低, 在多重波段环境下其工作能力将会大幅下降. ...
智慧高速毫米波雷达应用浅析
1
2021
... 毫米波雷达能够测量物体的距离、方位角及多普勒速度, 同时毫米波雷达与激光雷达相比, 其对于雾、霾、灰尘等天气的穿透能力更强, 探测范围更广且价格便宜[16 ] .但毫米波雷达精度较低, 在多重波段环境下其工作能力将会大幅下降. ...
智能汽车技术及环境感知传感器初探
1
2019
... 超声波雷达具备耗能缓慢、在介质中传播距离远、价格便宜等优点, 但超声波传输的速度极易受到天气影响, 当目标高速行驶时, 超声波由于其本身速度的限制, 无法跟上目标的实时速度变化, 从而丢失目标信息[17 ] .当目标距离较远时, 回波信号强度较差会大幅影响测量准确度. ...
智能汽车技术及环境感知传感器初探
1
2019
... 超声波雷达具备耗能缓慢、在介质中传播距离远、价格便宜等优点, 但超声波传输的速度极易受到天气影响, 当目标高速行驶时, 超声波由于其本身速度的限制, 无法跟上目标的实时速度变化, 从而丢失目标信息[17 ] .当目标距离较远时, 回波信号强度较差会大幅影响测量准确度. ...
红外成像技术中的9个问题
1
2013
... 红外热成像仪能够直观地感受到物体的温度场, 且其工作不受电磁影响, 作用距离也相对较远, 能够实现全天候环境感知.但红外热成像技术存在物体间温度差较小导致的图像分辨率差与对比度低等问题, 红外热成像仪不能穿透透明障碍物对目标进行识别, 且其制作成本也较为昂贵[18 ] . ...
红外成像技术中的9个问题
1
2013
... 红外热成像仪能够直观地感受到物体的温度场, 且其工作不受电磁影响, 作用距离也相对较远, 能够实现全天候环境感知.但红外热成像技术存在物体间温度差较小导致的图像分辨率差与对比度低等问题, 红外热成像仪不能穿透透明障碍物对目标进行识别, 且其制作成本也较为昂贵[18 ] . ...
移动机器人定位方法概述
2
2014
... 智能车自定位与环境建模密不可分.在未知环境中, 智能车依靠构建的环境地图进行自定位, 环境地图的准确性又依赖于定位精度.智能车处于陌生环境时, 往往由于缺乏参照物难以自定位.基于定位的环境建模与基于地图的定位都是比较容易实现的, 但二者抛开其一单独进行都会提高实现SLAM技术的难度.目前, 专家学者针对定位问题提出了许多解决方法, 主要可以分为4大类: 概率定位法[19 ] 、信标定位法[19 ] 、图形匹配定位法[20 ] 与全球定位系统.其中概率定位法作为SLAM技术的基础方法, 发展到现在已形成多种成熟的算法框架, 由于其对定位过程中各种不确定因素的应对能力更强、更易与其他各类定位方法配合使用, 且具备较强的自主探索能力, 所以广泛应用于智能车定位系统[20 ] .在概率定位法中, 比较常见的算法有基于卡尔曼滤波(Kalman filtering, KF)的SLAM算法、基于扩展卡尔曼滤波(extended Kalman filter, EKF)的SLAM算法、基于无迹卡尔曼滤波(unscented Kalman filter, UKF)的SLAM算法以及基于粒子滤波(particle filter, PF)的SLAM算法. ...
... [19 ]、图形匹配定位法[20 ] 与全球定位系统.其中概率定位法作为SLAM技术的基础方法, 发展到现在已形成多种成熟的算法框架, 由于其对定位过程中各种不确定因素的应对能力更强、更易与其他各类定位方法配合使用, 且具备较强的自主探索能力, 所以广泛应用于智能车定位系统[20 ] .在概率定位法中, 比较常见的算法有基于卡尔曼滤波(Kalman filtering, KF)的SLAM算法、基于扩展卡尔曼滤波(extended Kalman filter, EKF)的SLAM算法、基于无迹卡尔曼滤波(unscented Kalman filter, UKF)的SLAM算法以及基于粒子滤波(particle filter, PF)的SLAM算法. ...
移动机器人定位方法概述
2
2014
... 智能车自定位与环境建模密不可分.在未知环境中, 智能车依靠构建的环境地图进行自定位, 环境地图的准确性又依赖于定位精度.智能车处于陌生环境时, 往往由于缺乏参照物难以自定位.基于定位的环境建模与基于地图的定位都是比较容易实现的, 但二者抛开其一单独进行都会提高实现SLAM技术的难度.目前, 专家学者针对定位问题提出了许多解决方法, 主要可以分为4大类: 概率定位法[19 ] 、信标定位法[19 ] 、图形匹配定位法[20 ] 与全球定位系统.其中概率定位法作为SLAM技术的基础方法, 发展到现在已形成多种成熟的算法框架, 由于其对定位过程中各种不确定因素的应对能力更强、更易与其他各类定位方法配合使用, 且具备较强的自主探索能力, 所以广泛应用于智能车定位系统[20 ] .在概率定位法中, 比较常见的算法有基于卡尔曼滤波(Kalman filtering, KF)的SLAM算法、基于扩展卡尔曼滤波(extended Kalman filter, EKF)的SLAM算法、基于无迹卡尔曼滤波(unscented Kalman filter, UKF)的SLAM算法以及基于粒子滤波(particle filter, PF)的SLAM算法. ...
... [19 ]、图形匹配定位法[20 ] 与全球定位系统.其中概率定位法作为SLAM技术的基础方法, 发展到现在已形成多种成熟的算法框架, 由于其对定位过程中各种不确定因素的应对能力更强、更易与其他各类定位方法配合使用, 且具备较强的自主探索能力, 所以广泛应用于智能车定位系统[20 ] .在概率定位法中, 比较常见的算法有基于卡尔曼滤波(Kalman filtering, KF)的SLAM算法、基于扩展卡尔曼滤波(extended Kalman filter, EKF)的SLAM算法、基于无迹卡尔曼滤波(unscented Kalman filter, UKF)的SLAM算法以及基于粒子滤波(particle filter, PF)的SLAM算法. ...
自主移动机器人室内定位方法研究综述
2
2013
... 智能车自定位与环境建模密不可分.在未知环境中, 智能车依靠构建的环境地图进行自定位, 环境地图的准确性又依赖于定位精度.智能车处于陌生环境时, 往往由于缺乏参照物难以自定位.基于定位的环境建模与基于地图的定位都是比较容易实现的, 但二者抛开其一单独进行都会提高实现SLAM技术的难度.目前, 专家学者针对定位问题提出了许多解决方法, 主要可以分为4大类: 概率定位法[19 ] 、信标定位法[19 ] 、图形匹配定位法[20 ] 与全球定位系统.其中概率定位法作为SLAM技术的基础方法, 发展到现在已形成多种成熟的算法框架, 由于其对定位过程中各种不确定因素的应对能力更强、更易与其他各类定位方法配合使用, 且具备较强的自主探索能力, 所以广泛应用于智能车定位系统[20 ] .在概率定位法中, 比较常见的算法有基于卡尔曼滤波(Kalman filtering, KF)的SLAM算法、基于扩展卡尔曼滤波(extended Kalman filter, EKF)的SLAM算法、基于无迹卡尔曼滤波(unscented Kalman filter, UKF)的SLAM算法以及基于粒子滤波(particle filter, PF)的SLAM算法. ...
... [20 ].在概率定位法中, 比较常见的算法有基于卡尔曼滤波(Kalman filtering, KF)的SLAM算法、基于扩展卡尔曼滤波(extended Kalman filter, EKF)的SLAM算法、基于无迹卡尔曼滤波(unscented Kalman filter, UKF)的SLAM算法以及基于粒子滤波(particle filter, PF)的SLAM算法. ...
自主移动机器人室内定位方法研究综述
2
2013
... 智能车自定位与环境建模密不可分.在未知环境中, 智能车依靠构建的环境地图进行自定位, 环境地图的准确性又依赖于定位精度.智能车处于陌生环境时, 往往由于缺乏参照物难以自定位.基于定位的环境建模与基于地图的定位都是比较容易实现的, 但二者抛开其一单独进行都会提高实现SLAM技术的难度.目前, 专家学者针对定位问题提出了许多解决方法, 主要可以分为4大类: 概率定位法[19 ] 、信标定位法[19 ] 、图形匹配定位法[20 ] 与全球定位系统.其中概率定位法作为SLAM技术的基础方法, 发展到现在已形成多种成熟的算法框架, 由于其对定位过程中各种不确定因素的应对能力更强、更易与其他各类定位方法配合使用, 且具备较强的自主探索能力, 所以广泛应用于智能车定位系统[20 ] .在概率定位法中, 比较常见的算法有基于卡尔曼滤波(Kalman filtering, KF)的SLAM算法、基于扩展卡尔曼滤波(extended Kalman filter, EKF)的SLAM算法、基于无迹卡尔曼滤波(unscented Kalman filter, UKF)的SLAM算法以及基于粒子滤波(particle filter, PF)的SLAM算法. ...
... [20 ].在概率定位法中, 比较常见的算法有基于卡尔曼滤波(Kalman filtering, KF)的SLAM算法、基于扩展卡尔曼滤波(extended Kalman filter, EKF)的SLAM算法、基于无迹卡尔曼滤波(unscented Kalman filter, UKF)的SLAM算法以及基于粒子滤波(particle filter, PF)的SLAM算法. ...
一种基于多传感融合的室内建图和定位算法
1
2018
... 通过多种内部传感器感知信息, 将获得的数据进行融合以减少定位误差是进行建图的重要手段之一[21 ] , 使用该方法进行数据融合多基于卡尔曼滤波算法.卡尔曼滤波通过利用线性系统状态方程, 根据系统输入的观测数据与输出的分析数据, 对系统的状态进行最优估计.SLAM算法在早期利用卡尔曼滤波的方法进行位姿与环境特征估计, 卡尔曼滤波最早由Stanley[22 ] 于1958年提出, 这一方法虽已提出半个世纪, 仍是各个领域专家学者们研究的热门对象. ...
一种基于多传感融合的室内建图和定位算法
1
2018
... 通过多种内部传感器感知信息, 将获得的数据进行融合以减少定位误差是进行建图的重要手段之一[21 ] , 使用该方法进行数据融合多基于卡尔曼滤波算法.卡尔曼滤波通过利用线性系统状态方程, 根据系统输入的观测数据与输出的分析数据, 对系统的状态进行最优估计.SLAM算法在早期利用卡尔曼滤波的方法进行位姿与环境特征估计, 卡尔曼滤波最早由Stanley[22 ] 于1958年提出, 这一方法虽已提出半个世纪, 仍是各个领域专家学者们研究的热门对象. ...
1
... 通过多种内部传感器感知信息, 将获得的数据进行融合以减少定位误差是进行建图的重要手段之一[21 ] , 使用该方法进行数据融合多基于卡尔曼滤波算法.卡尔曼滤波通过利用线性系统状态方程, 根据系统输入的观测数据与输出的分析数据, 对系统的状态进行最优估计.SLAM算法在早期利用卡尔曼滤波的方法进行位姿与环境特征估计, 卡尔曼滤波最早由Stanley[22 ] 于1958年提出, 这一方法虽已提出半个世纪, 仍是各个领域专家学者们研究的热门对象. ...
自动化技术、计算机技术
1
2011
... 卡尔曼滤波算法可分为预测与更新2个过程, 该算法的核心思想是递归求解[23 ] .卡尔曼滤波适用于线性系统, 然而智能车导航定位与制图大多属于非线性、非高斯系统, 基于卡尔曼滤波的SLAM算法在位姿估计时存在很大的误差, 且该方法受环境噪声影响较大[24 ] .为解决以上问题, 研究学者们相继提出基于扩展卡尔曼滤波的SLAM算法、基于无迹卡尔曼滤波的SLAM算法和基于粒子滤波的SLAM算法[25 ] . ...
自动化技术、计算机技术
1
2011
... 卡尔曼滤波算法可分为预测与更新2个过程, 该算法的核心思想是递归求解[23 ] .卡尔曼滤波适用于线性系统, 然而智能车导航定位与制图大多属于非线性、非高斯系统, 基于卡尔曼滤波的SLAM算法在位姿估计时存在很大的误差, 且该方法受环境噪声影响较大[24 ] .为解决以上问题, 研究学者们相继提出基于扩展卡尔曼滤波的SLAM算法、基于无迹卡尔曼滤波的SLAM算法和基于粒子滤波的SLAM算法[25 ] . ...
基于单目视觉与惯导融合的无人机位姿估计
1
2017
... 卡尔曼滤波算法可分为预测与更新2个过程, 该算法的核心思想是递归求解[23 ] .卡尔曼滤波适用于线性系统, 然而智能车导航定位与制图大多属于非线性、非高斯系统, 基于卡尔曼滤波的SLAM算法在位姿估计时存在很大的误差, 且该方法受环境噪声影响较大[24 ] .为解决以上问题, 研究学者们相继提出基于扩展卡尔曼滤波的SLAM算法、基于无迹卡尔曼滤波的SLAM算法和基于粒子滤波的SLAM算法[25 ] . ...
基于单目视觉与惯导融合的无人机位姿估计
1
2017
... 卡尔曼滤波算法可分为预测与更新2个过程, 该算法的核心思想是递归求解[23 ] .卡尔曼滤波适用于线性系统, 然而智能车导航定位与制图大多属于非线性、非高斯系统, 基于卡尔曼滤波的SLAM算法在位姿估计时存在很大的误差, 且该方法受环境噪声影响较大[24 ] .为解决以上问题, 研究学者们相继提出基于扩展卡尔曼滤波的SLAM算法、基于无迹卡尔曼滤波的SLAM算法和基于粒子滤波的SLAM算法[25 ] . ...
一种改进的UKF-SlAM算法
1
2018
... 卡尔曼滤波算法可分为预测与更新2个过程, 该算法的核心思想是递归求解[23 ] .卡尔曼滤波适用于线性系统, 然而智能车导航定位与制图大多属于非线性、非高斯系统, 基于卡尔曼滤波的SLAM算法在位姿估计时存在很大的误差, 且该方法受环境噪声影响较大[24 ] .为解决以上问题, 研究学者们相继提出基于扩展卡尔曼滤波的SLAM算法、基于无迹卡尔曼滤波的SLAM算法和基于粒子滤波的SLAM算法[25 ] . ...
一种改进的UKF-SlAM算法
1
2018
... 卡尔曼滤波算法可分为预测与更新2个过程, 该算法的核心思想是递归求解[23 ] .卡尔曼滤波适用于线性系统, 然而智能车导航定位与制图大多属于非线性、非高斯系统, 基于卡尔曼滤波的SLAM算法在位姿估计时存在很大的误差, 且该方法受环境噪声影响较大[24 ] .为解决以上问题, 研究学者们相继提出基于扩展卡尔曼滤波的SLAM算法、基于无迹卡尔曼滤波的SLAM算法和基于粒子滤波的SLAM算法[25 ] . ...
1
... EKF首次由Mcelhoe等[26 ] 提出.Smith等[27 ] 提出将EKF应用于地图创建.Yavuz等[28 ] 提出基于EKF的SLAM算法, 随后该方法成为SLAM定位问题研究中的基础理论.EKF算法进行定位与地图创建主要分为3部分: 状态预测、过程更新以及状态增广.在EKF算法中, 位姿估计与环境地图构建均由高维状态向量表示, 通过泰勒公式将非线性输入与输出方程线性化, 同时对状态向量的均值与方差进行估计和优化. ...
Estimating uncertain spatial relationships in robotics
1
1988
... EKF首次由Mcelhoe等[26 ] 提出.Smith等[27 ] 提出将EKF应用于地图创建.Yavuz等[28 ] 提出基于EKF的SLAM算法, 随后该方法成为SLAM定位问题研究中的基础理论.EKF算法进行定位与地图创建主要分为3部分: 状态预测、过程更新以及状态增广.在EKF算法中, 位姿估计与环境地图构建均由高维状态向量表示, 通过泰勒公式将非线性输入与输出方程线性化, 同时对状态向量的均值与方差进行估计和优化. ...
1
... EKF首次由Mcelhoe等[26 ] 提出.Smith等[27 ] 提出将EKF应用于地图创建.Yavuz等[28 ] 提出基于EKF的SLAM算法, 随后该方法成为SLAM定位问题研究中的基础理论.EKF算法进行定位与地图创建主要分为3部分: 状态预测、过程更新以及状态增广.在EKF算法中, 位姿估计与环境地图构建均由高维状态向量表示, 通过泰勒公式将非线性输入与输出方程线性化, 同时对状态向量的均值与方差进行估计和优化. ...
基于时变调节因子的移动机器人EKF-SLAM算法
1
2017
... 王盼盼等[29 ] 基于EKF-SLAM算法, 通过引入时变调节因子决定滤波增益, 提高了状态估计精度并提供最优规划路径, 对EKF-SLAM算法做出优化.付强等[30 ] 提出一种基于最优平滑滤波理论的改进SLAM算法, 通过仿真试验与实地测试, 提高了SLAM算法的精确度与抗干扰能力, 解决了传统EKF算法计算量较大的问题.刘沛丰等[31 ] 基于粗差对EKF算法的影响, 提出一种抗差EKF-SLAM算法, 通过判断测量数据中是否存在粗差, 选择是否进行抗差迭代计算, 通过对比引入粗差前后的EKF模型试验结果, 可知该方法能够极大提高SLAM模型计算效率.程璐等[32 ] 基于Sage-Husa的自适应滤波算法, 通过对扩展卡尔曼滤波SLAM算法中存在的后验协方差估计矩阵进行Cholesky分解, 极大提高了系统的运行效率与估计精确度.Chatterjee等[33 ] 根据粒子群优化提出了一种基于模糊自适应的扩展卡尔曼滤波SLAM算法, 利用自适应模糊系统对观测噪声做出调整, 维持系统噪声不变, 模糊系统的参数通过粒子群优化算法计算得到, 免除了人工选择的过程, 难以对模糊系统参量进行选择的难题得到解决. ...
基于时变调节因子的移动机器人EKF-SLAM算法
1
2017
... 王盼盼等[29 ] 基于EKF-SLAM算法, 通过引入时变调节因子决定滤波增益, 提高了状态估计精度并提供最优规划路径, 对EKF-SLAM算法做出优化.付强等[30 ] 提出一种基于最优平滑滤波理论的改进SLAM算法, 通过仿真试验与实地测试, 提高了SLAM算法的精确度与抗干扰能力, 解决了传统EKF算法计算量较大的问题.刘沛丰等[31 ] 基于粗差对EKF算法的影响, 提出一种抗差EKF-SLAM算法, 通过判断测量数据中是否存在粗差, 选择是否进行抗差迭代计算, 通过对比引入粗差前后的EKF模型试验结果, 可知该方法能够极大提高SLAM模型计算效率.程璐等[32 ] 基于Sage-Husa的自适应滤波算法, 通过对扩展卡尔曼滤波SLAM算法中存在的后验协方差估计矩阵进行Cholesky分解, 极大提高了系统的运行效率与估计精确度.Chatterjee等[33 ] 根据粒子群优化提出了一种基于模糊自适应的扩展卡尔曼滤波SLAM算法, 利用自适应模糊系统对观测噪声做出调整, 维持系统噪声不变, 模糊系统的参数通过粒子群优化算法计算得到, 免除了人工选择的过程, 难以对模糊系统参量进行选择的难题得到解决. ...
移动机器人SLAM改进算法的分析与实现
1
2018
... 王盼盼等[29 ] 基于EKF-SLAM算法, 通过引入时变调节因子决定滤波增益, 提高了状态估计精度并提供最优规划路径, 对EKF-SLAM算法做出优化.付强等[30 ] 提出一种基于最优平滑滤波理论的改进SLAM算法, 通过仿真试验与实地测试, 提高了SLAM算法的精确度与抗干扰能力, 解决了传统EKF算法计算量较大的问题.刘沛丰等[31 ] 基于粗差对EKF算法的影响, 提出一种抗差EKF-SLAM算法, 通过判断测量数据中是否存在粗差, 选择是否进行抗差迭代计算, 通过对比引入粗差前后的EKF模型试验结果, 可知该方法能够极大提高SLAM模型计算效率.程璐等[32 ] 基于Sage-Husa的自适应滤波算法, 通过对扩展卡尔曼滤波SLAM算法中存在的后验协方差估计矩阵进行Cholesky分解, 极大提高了系统的运行效率与估计精确度.Chatterjee等[33 ] 根据粒子群优化提出了一种基于模糊自适应的扩展卡尔曼滤波SLAM算法, 利用自适应模糊系统对观测噪声做出调整, 维持系统噪声不变, 模糊系统的参数通过粒子群优化算法计算得到, 免除了人工选择的过程, 难以对模糊系统参量进行选择的难题得到解决. ...
移动机器人SLAM改进算法的分析与实现
1
2018
... 王盼盼等[29 ] 基于EKF-SLAM算法, 通过引入时变调节因子决定滤波增益, 提高了状态估计精度并提供最优规划路径, 对EKF-SLAM算法做出优化.付强等[30 ] 提出一种基于最优平滑滤波理论的改进SLAM算法, 通过仿真试验与实地测试, 提高了SLAM算法的精确度与抗干扰能力, 解决了传统EKF算法计算量较大的问题.刘沛丰等[31 ] 基于粗差对EKF算法的影响, 提出一种抗差EKF-SLAM算法, 通过判断测量数据中是否存在粗差, 选择是否进行抗差迭代计算, 通过对比引入粗差前后的EKF模型试验结果, 可知该方法能够极大提高SLAM模型计算效率.程璐等[32 ] 基于Sage-Husa的自适应滤波算法, 通过对扩展卡尔曼滤波SLAM算法中存在的后验协方差估计矩阵进行Cholesky分解, 极大提高了系统的运行效率与估计精确度.Chatterjee等[33 ] 根据粒子群优化提出了一种基于模糊自适应的扩展卡尔曼滤波SLAM算法, 利用自适应模糊系统对观测噪声做出调整, 维持系统噪声不变, 模糊系统的参数通过粒子群优化算法计算得到, 免除了人工选择的过程, 难以对模糊系统参量进行选择的难题得到解决. ...
一种基于抗差EKF的移动机器人定位技术
1
2017
... 王盼盼等[29 ] 基于EKF-SLAM算法, 通过引入时变调节因子决定滤波增益, 提高了状态估计精度并提供最优规划路径, 对EKF-SLAM算法做出优化.付强等[30 ] 提出一种基于最优平滑滤波理论的改进SLAM算法, 通过仿真试验与实地测试, 提高了SLAM算法的精确度与抗干扰能力, 解决了传统EKF算法计算量较大的问题.刘沛丰等[31 ] 基于粗差对EKF算法的影响, 提出一种抗差EKF-SLAM算法, 通过判断测量数据中是否存在粗差, 选择是否进行抗差迭代计算, 通过对比引入粗差前后的EKF模型试验结果, 可知该方法能够极大提高SLAM模型计算效率.程璐等[32 ] 基于Sage-Husa的自适应滤波算法, 通过对扩展卡尔曼滤波SLAM算法中存在的后验协方差估计矩阵进行Cholesky分解, 极大提高了系统的运行效率与估计精确度.Chatterjee等[33 ] 根据粒子群优化提出了一种基于模糊自适应的扩展卡尔曼滤波SLAM算法, 利用自适应模糊系统对观测噪声做出调整, 维持系统噪声不变, 模糊系统的参数通过粒子群优化算法计算得到, 免除了人工选择的过程, 难以对模糊系统参量进行选择的难题得到解决. ...
一种基于抗差EKF的移动机器人定位技术
1
2017
... 王盼盼等[29 ] 基于EKF-SLAM算法, 通过引入时变调节因子决定滤波增益, 提高了状态估计精度并提供最优规划路径, 对EKF-SLAM算法做出优化.付强等[30 ] 提出一种基于最优平滑滤波理论的改进SLAM算法, 通过仿真试验与实地测试, 提高了SLAM算法的精确度与抗干扰能力, 解决了传统EKF算法计算量较大的问题.刘沛丰等[31 ] 基于粗差对EKF算法的影响, 提出一种抗差EKF-SLAM算法, 通过判断测量数据中是否存在粗差, 选择是否进行抗差迭代计算, 通过对比引入粗差前后的EKF模型试验结果, 可知该方法能够极大提高SLAM模型计算效率.程璐等[32 ] 基于Sage-Husa的自适应滤波算法, 通过对扩展卡尔曼滤波SLAM算法中存在的后验协方差估计矩阵进行Cholesky分解, 极大提高了系统的运行效率与估计精确度.Chatterjee等[33 ] 根据粒子群优化提出了一种基于模糊自适应的扩展卡尔曼滤波SLAM算法, 利用自适应模糊系统对观测噪声做出调整, 维持系统噪声不变, 模糊系统的参数通过粒子群优化算法计算得到, 免除了人工选择的过程, 难以对模糊系统参量进行选择的难题得到解决. ...
基于Cholesky分解的改进自适应EKF-SLAM算法
1
2020
... 王盼盼等[29 ] 基于EKF-SLAM算法, 通过引入时变调节因子决定滤波增益, 提高了状态估计精度并提供最优规划路径, 对EKF-SLAM算法做出优化.付强等[30 ] 提出一种基于最优平滑滤波理论的改进SLAM算法, 通过仿真试验与实地测试, 提高了SLAM算法的精确度与抗干扰能力, 解决了传统EKF算法计算量较大的问题.刘沛丰等[31 ] 基于粗差对EKF算法的影响, 提出一种抗差EKF-SLAM算法, 通过判断测量数据中是否存在粗差, 选择是否进行抗差迭代计算, 通过对比引入粗差前后的EKF模型试验结果, 可知该方法能够极大提高SLAM模型计算效率.程璐等[32 ] 基于Sage-Husa的自适应滤波算法, 通过对扩展卡尔曼滤波SLAM算法中存在的后验协方差估计矩阵进行Cholesky分解, 极大提高了系统的运行效率与估计精确度.Chatterjee等[33 ] 根据粒子群优化提出了一种基于模糊自适应的扩展卡尔曼滤波SLAM算法, 利用自适应模糊系统对观测噪声做出调整, 维持系统噪声不变, 模糊系统的参数通过粒子群优化算法计算得到, 免除了人工选择的过程, 难以对模糊系统参量进行选择的难题得到解决. ...
基于Cholesky分解的改进自适应EKF-SLAM算法
1
2020
... 王盼盼等[29 ] 基于EKF-SLAM算法, 通过引入时变调节因子决定滤波增益, 提高了状态估计精度并提供最优规划路径, 对EKF-SLAM算法做出优化.付强等[30 ] 提出一种基于最优平滑滤波理论的改进SLAM算法, 通过仿真试验与实地测试, 提高了SLAM算法的精确度与抗干扰能力, 解决了传统EKF算法计算量较大的问题.刘沛丰等[31 ] 基于粗差对EKF算法的影响, 提出一种抗差EKF-SLAM算法, 通过判断测量数据中是否存在粗差, 选择是否进行抗差迭代计算, 通过对比引入粗差前后的EKF模型试验结果, 可知该方法能够极大提高SLAM模型计算效率.程璐等[32 ] 基于Sage-Husa的自适应滤波算法, 通过对扩展卡尔曼滤波SLAM算法中存在的后验协方差估计矩阵进行Cholesky分解, 极大提高了系统的运行效率与估计精确度.Chatterjee等[33 ] 根据粒子群优化提出了一种基于模糊自适应的扩展卡尔曼滤波SLAM算法, 利用自适应模糊系统对观测噪声做出调整, 维持系统噪声不变, 模糊系统的参数通过粒子群优化算法计算得到, 免除了人工选择的过程, 难以对模糊系统参量进行选择的难题得到解决. ...
A neuro-fuzzy assisted extended Kalman filter-based approach for simultaneous localization and mapping (SLAM) problems
1
2007
... 王盼盼等[29 ] 基于EKF-SLAM算法, 通过引入时变调节因子决定滤波增益, 提高了状态估计精度并提供最优规划路径, 对EKF-SLAM算法做出优化.付强等[30 ] 提出一种基于最优平滑滤波理论的改进SLAM算法, 通过仿真试验与实地测试, 提高了SLAM算法的精确度与抗干扰能力, 解决了传统EKF算法计算量较大的问题.刘沛丰等[31 ] 基于粗差对EKF算法的影响, 提出一种抗差EKF-SLAM算法, 通过判断测量数据中是否存在粗差, 选择是否进行抗差迭代计算, 通过对比引入粗差前后的EKF模型试验结果, 可知该方法能够极大提高SLAM模型计算效率.程璐等[32 ] 基于Sage-Husa的自适应滤波算法, 通过对扩展卡尔曼滤波SLAM算法中存在的后验协方差估计矩阵进行Cholesky分解, 极大提高了系统的运行效率与估计精确度.Chatterjee等[33 ] 根据粒子群优化提出了一种基于模糊自适应的扩展卡尔曼滤波SLAM算法, 利用自适应模糊系统对观测噪声做出调整, 维持系统噪声不变, 模糊系统的参数通过粒子群优化算法计算得到, 免除了人工选择的过程, 难以对模糊系统参量进行选择的难题得到解决. ...
MaskUKF: an instance segmentation aided unscented Kalman filter for 6D object pose and velocitytracking
1
2021
... 无迹卡尔曼滤波又称无损卡尔曼滤波, 其核心思想是通过无损变换计算均值与协方差, 通过确定样本点对新时刻的状态进行预测, 该方法属于递归式贝叶斯估计法[34 ] .确定性样本点即Sigma点, 通过非线性函数的映射能够得到每个点的权重[35 ] .由于UKF算法将整个系统看做“黑匣子”, 摆脱了系统运行时对非线性函数具体形式的依赖性.UKF算法于1990年由Julier等提出, 试验证明该算法能够改善非线性系统的滤波效果, 广泛应用于GPS-IMU组合导航系统. ...
基于卡尔曼滤波与粒子滤波的SLAM研究综述
1
2018
... 无迹卡尔曼滤波又称无损卡尔曼滤波, 其核心思想是通过无损变换计算均值与协方差, 通过确定样本点对新时刻的状态进行预测, 该方法属于递归式贝叶斯估计法[34 ] .确定性样本点即Sigma点, 通过非线性函数的映射能够得到每个点的权重[35 ] .由于UKF算法将整个系统看做“黑匣子”, 摆脱了系统运行时对非线性函数具体形式的依赖性.UKF算法于1990年由Julier等提出, 试验证明该算法能够改善非线性系统的滤波效果, 广泛应用于GPS-IMU组合导航系统. ...
基于卡尔曼滤波与粒子滤波的SLAM研究综述
1
2018
... 无迹卡尔曼滤波又称无损卡尔曼滤波, 其核心思想是通过无损变换计算均值与协方差, 通过确定样本点对新时刻的状态进行预测, 该方法属于递归式贝叶斯估计法[34 ] .确定性样本点即Sigma点, 通过非线性函数的映射能够得到每个点的权重[35 ] .由于UKF算法将整个系统看做“黑匣子”, 摆脱了系统运行时对非线性函数具体形式的依赖性.UKF算法于1990年由Julier等提出, 试验证明该算法能够改善非线性系统的滤波效果, 广泛应用于GPS-IMU组合导航系统. ...
Nonorthogonal problem in iterated unscented Kalman filter for passive tracking
1
2013
... 虽然UKF的计算复杂度较EKF并未降低, 但UKF符合具有特殊要求的非线性滤波, 在技术方面更易实现, 且适合处理强非线性状态方程.因此, UKF也逐渐成为SLAM技术研究的热门.Liu等[36 ] 基于无迹卡尔曼滤波, 提出一种自适应的平方根无迹卡尔曼滤波算法, 该方法能够突破UKF原本限制的范围, 可以应用于高斯回归过程.Chen等[37 ] 首次将UKF算法引入人脸识别问题中, 由于UKF具备较高的鲁棒性且能够规避粒子退化现象, 极大提高了目标跟踪的效果.刘艳等[38 ] 为解决复杂环境下的噪声干扰即轨迹预测误差等问题, 提出一种基于鲁棒自适应的无迹卡尔曼滤波SLAM算法, 该算法将自适应估计理论与鲁棒控制准则引入传统UKF, 通过自适应理论实现粗差分离, 利用鲁棒控制准则提高抗干扰性, 从而降低运动轨迹的误差. ...
1
... 虽然UKF的计算复杂度较EKF并未降低, 但UKF符合具有特殊要求的非线性滤波, 在技术方面更易实现, 且适合处理强非线性状态方程.因此, UKF也逐渐成为SLAM技术研究的热门.Liu等[36 ] 基于无迹卡尔曼滤波, 提出一种自适应的平方根无迹卡尔曼滤波算法, 该方法能够突破UKF原本限制的范围, 可以应用于高斯回归过程.Chen等[37 ] 首次将UKF算法引入人脸识别问题中, 由于UKF具备较高的鲁棒性且能够规避粒子退化现象, 极大提高了目标跟踪的效果.刘艳等[38 ] 为解决复杂环境下的噪声干扰即轨迹预测误差等问题, 提出一种基于鲁棒自适应的无迹卡尔曼滤波SLAM算法, 该算法将自适应估计理论与鲁棒控制准则引入传统UKF, 通过自适应理论实现粗差分离, 利用鲁棒控制准则提高抗干扰性, 从而降低运动轨迹的误差. ...
鲁棒自适应无迹卡尔曼滤波的SLAM算法
1
2019
... 虽然UKF的计算复杂度较EKF并未降低, 但UKF符合具有特殊要求的非线性滤波, 在技术方面更易实现, 且适合处理强非线性状态方程.因此, UKF也逐渐成为SLAM技术研究的热门.Liu等[36 ] 基于无迹卡尔曼滤波, 提出一种自适应的平方根无迹卡尔曼滤波算法, 该方法能够突破UKF原本限制的范围, 可以应用于高斯回归过程.Chen等[37 ] 首次将UKF算法引入人脸识别问题中, 由于UKF具备较高的鲁棒性且能够规避粒子退化现象, 极大提高了目标跟踪的效果.刘艳等[38 ] 为解决复杂环境下的噪声干扰即轨迹预测误差等问题, 提出一种基于鲁棒自适应的无迹卡尔曼滤波SLAM算法, 该算法将自适应估计理论与鲁棒控制准则引入传统UKF, 通过自适应理论实现粗差分离, 利用鲁棒控制准则提高抗干扰性, 从而降低运动轨迹的误差. ...
鲁棒自适应无迹卡尔曼滤波的SLAM算法
1
2019
... 虽然UKF的计算复杂度较EKF并未降低, 但UKF符合具有特殊要求的非线性滤波, 在技术方面更易实现, 且适合处理强非线性状态方程.因此, UKF也逐渐成为SLAM技术研究的热门.Liu等[36 ] 基于无迹卡尔曼滤波, 提出一种自适应的平方根无迹卡尔曼滤波算法, 该方法能够突破UKF原本限制的范围, 可以应用于高斯回归过程.Chen等[37 ] 首次将UKF算法引入人脸识别问题中, 由于UKF具备较高的鲁棒性且能够规避粒子退化现象, 极大提高了目标跟踪的效果.刘艳等[38 ] 为解决复杂环境下的噪声干扰即轨迹预测误差等问题, 提出一种基于鲁棒自适应的无迹卡尔曼滤波SLAM算法, 该算法将自适应估计理论与鲁棒控制准则引入传统UKF, 通过自适应理论实现粗差分离, 利用鲁棒控制准则提高抗干扰性, 从而降低运动轨迹的误差. ...
1
... PF算法为每个粒子赋予一个权值, 其中每个粒子分别代表某一时刻的状态, 通过对这些具备一定权重的粒子进行求和以逼近系统的后验概率分布[39 ] .PF算法能够降低高斯噪声与非线性误差对系统模型带来的影响, 计算复杂度大幅降低.粒子滤波的流程如图 3 所示. ...
Novel-approach to nonlinear non-gaussian Bayesian state estimation
1
1993
... Murphy和Doucet首次提出将粒子滤波用于SLAM算法.粒子滤波这一概念刚提出时, 由于其存在粒子退化问题并没有立刻应用到定位与建图领域.1993年Gordon等[40 ] 提出一种非线性滤波方法, 通过序列显著性采样克服粒子早期退化效应, 粒子滤波算法得到改进.此后, 针对粒子滤波算法的改进逐渐成为专家学者们研究的热门. ...
一种改进的边缘粒子滤波slam方法
1
2008
... 周武等[41 ] 提出一种改进的边缘粒子滤波定位与建图方法, 该方法结合了Marginal-SLAM算法与遗传算法, 通过最新观测信息对粒子集进行优化, 保留了粒子集多样性的特点, 提高了算法的运行效率与综合性能.吴培良等[42 ] 基于提议分布选择, 对粒子滤波算法做出改进, 通过对更接近状态后验密度函数进行推导求出其提议分布, 将单个粒子提议分布的权值与最新观测信息进行融合, 提高了改进边缘粒子滤波的估计准确度, 有效抑制了粒子退化现象.为解决各类非线性问题, Dellaert等[43 ] 提出蒙特卡罗粒子滤波定位算法, 该方法基于PF算法, 利用里程计与传感器进行定位, 将散乱粒子集表示为概率, 通过搜索散乱粒子得到相应的概率密度函数.石雪军等[44 ] 基于接收信号强度指示直接构建非线性状态空间模型, 通过马尔科夫链蒙特卡洛移动步骤对重采样系统进行改进, 该方法能够提高粒子多样性、跟踪精度及滤波性能.武斌等[45 ] 针对室内SLAM算法易受噪声干扰的问题, 提出一种改进无迹粒子滤波的室内移动目标定位算法, 通过多项式拟合修正信号观测强度, 利用价权函数抑制异常噪声的影响, 该方法能够有效提高系统的抗干扰能力与室内定位精度.Montemerlo等[46 ] 、Thrun等[47 ] 以前人研究为基础, 对基于粒子滤波的SLAM算法框架做出完善, 提出Fast SLAM算法.Fast SLAM算法的核心思想是通过EKF算法估计路标的实际位置, 通过PF算法估计移动机器人的运动轨迹, 该算法能够有效提高定位精度. ...
一种改进的边缘粒子滤波slam方法
1
2008
... 周武等[41 ] 提出一种改进的边缘粒子滤波定位与建图方法, 该方法结合了Marginal-SLAM算法与遗传算法, 通过最新观测信息对粒子集进行优化, 保留了粒子集多样性的特点, 提高了算法的运行效率与综合性能.吴培良等[42 ] 基于提议分布选择, 对粒子滤波算法做出改进, 通过对更接近状态后验密度函数进行推导求出其提议分布, 将单个粒子提议分布的权值与最新观测信息进行融合, 提高了改进边缘粒子滤波的估计准确度, 有效抑制了粒子退化现象.为解决各类非线性问题, Dellaert等[43 ] 提出蒙特卡罗粒子滤波定位算法, 该方法基于PF算法, 利用里程计与传感器进行定位, 将散乱粒子集表示为概率, 通过搜索散乱粒子得到相应的概率密度函数.石雪军等[44 ] 基于接收信号强度指示直接构建非线性状态空间模型, 通过马尔科夫链蒙特卡洛移动步骤对重采样系统进行改进, 该方法能够提高粒子多样性、跟踪精度及滤波性能.武斌等[45 ] 针对室内SLAM算法易受噪声干扰的问题, 提出一种改进无迹粒子滤波的室内移动目标定位算法, 通过多项式拟合修正信号观测强度, 利用价权函数抑制异常噪声的影响, 该方法能够有效提高系统的抗干扰能力与室内定位精度.Montemerlo等[46 ] 、Thrun等[47 ] 以前人研究为基础, 对基于粒子滤波的SLAM算法框架做出完善, 提出Fast SLAM算法.Fast SLAM算法的核心思想是通过EKF算法估计路标的实际位置, 通过PF算法估计移动机器人的运动轨迹, 该算法能够有效提高定位精度. ...
一种基于提议分布选择的改进边缘粒子滤波算法
1
2016
... 周武等[41 ] 提出一种改进的边缘粒子滤波定位与建图方法, 该方法结合了Marginal-SLAM算法与遗传算法, 通过最新观测信息对粒子集进行优化, 保留了粒子集多样性的特点, 提高了算法的运行效率与综合性能.吴培良等[42 ] 基于提议分布选择, 对粒子滤波算法做出改进, 通过对更接近状态后验密度函数进行推导求出其提议分布, 将单个粒子提议分布的权值与最新观测信息进行融合, 提高了改进边缘粒子滤波的估计准确度, 有效抑制了粒子退化现象.为解决各类非线性问题, Dellaert等[43 ] 提出蒙特卡罗粒子滤波定位算法, 该方法基于PF算法, 利用里程计与传感器进行定位, 将散乱粒子集表示为概率, 通过搜索散乱粒子得到相应的概率密度函数.石雪军等[44 ] 基于接收信号强度指示直接构建非线性状态空间模型, 通过马尔科夫链蒙特卡洛移动步骤对重采样系统进行改进, 该方法能够提高粒子多样性、跟踪精度及滤波性能.武斌等[45 ] 针对室内SLAM算法易受噪声干扰的问题, 提出一种改进无迹粒子滤波的室内移动目标定位算法, 通过多项式拟合修正信号观测强度, 利用价权函数抑制异常噪声的影响, 该方法能够有效提高系统的抗干扰能力与室内定位精度.Montemerlo等[46 ] 、Thrun等[47 ] 以前人研究为基础, 对基于粒子滤波的SLAM算法框架做出完善, 提出Fast SLAM算法.Fast SLAM算法的核心思想是通过EKF算法估计路标的实际位置, 通过PF算法估计移动机器人的运动轨迹, 该算法能够有效提高定位精度. ...
一种基于提议分布选择的改进边缘粒子滤波算法
1
2016
... 周武等[41 ] 提出一种改进的边缘粒子滤波定位与建图方法, 该方法结合了Marginal-SLAM算法与遗传算法, 通过最新观测信息对粒子集进行优化, 保留了粒子集多样性的特点, 提高了算法的运行效率与综合性能.吴培良等[42 ] 基于提议分布选择, 对粒子滤波算法做出改进, 通过对更接近状态后验密度函数进行推导求出其提议分布, 将单个粒子提议分布的权值与最新观测信息进行融合, 提高了改进边缘粒子滤波的估计准确度, 有效抑制了粒子退化现象.为解决各类非线性问题, Dellaert等[43 ] 提出蒙特卡罗粒子滤波定位算法, 该方法基于PF算法, 利用里程计与传感器进行定位, 将散乱粒子集表示为概率, 通过搜索散乱粒子得到相应的概率密度函数.石雪军等[44 ] 基于接收信号强度指示直接构建非线性状态空间模型, 通过马尔科夫链蒙特卡洛移动步骤对重采样系统进行改进, 该方法能够提高粒子多样性、跟踪精度及滤波性能.武斌等[45 ] 针对室内SLAM算法易受噪声干扰的问题, 提出一种改进无迹粒子滤波的室内移动目标定位算法, 通过多项式拟合修正信号观测强度, 利用价权函数抑制异常噪声的影响, 该方法能够有效提高系统的抗干扰能力与室内定位精度.Montemerlo等[46 ] 、Thrun等[47 ] 以前人研究为基础, 对基于粒子滤波的SLAM算法框架做出完善, 提出Fast SLAM算法.Fast SLAM算法的核心思想是通过EKF算法估计路标的实际位置, 通过PF算法估计移动机器人的运动轨迹, 该算法能够有效提高定位精度. ...
1
... 周武等[41 ] 提出一种改进的边缘粒子滤波定位与建图方法, 该方法结合了Marginal-SLAM算法与遗传算法, 通过最新观测信息对粒子集进行优化, 保留了粒子集多样性的特点, 提高了算法的运行效率与综合性能.吴培良等[42 ] 基于提议分布选择, 对粒子滤波算法做出改进, 通过对更接近状态后验密度函数进行推导求出其提议分布, 将单个粒子提议分布的权值与最新观测信息进行融合, 提高了改进边缘粒子滤波的估计准确度, 有效抑制了粒子退化现象.为解决各类非线性问题, Dellaert等[43 ] 提出蒙特卡罗粒子滤波定位算法, 该方法基于PF算法, 利用里程计与传感器进行定位, 将散乱粒子集表示为概率, 通过搜索散乱粒子得到相应的概率密度函数.石雪军等[44 ] 基于接收信号强度指示直接构建非线性状态空间模型, 通过马尔科夫链蒙特卡洛移动步骤对重采样系统进行改进, 该方法能够提高粒子多样性、跟踪精度及滤波性能.武斌等[45 ] 针对室内SLAM算法易受噪声干扰的问题, 提出一种改进无迹粒子滤波的室内移动目标定位算法, 通过多项式拟合修正信号观测强度, 利用价权函数抑制异常噪声的影响, 该方法能够有效提高系统的抗干扰能力与室内定位精度.Montemerlo等[46 ] 、Thrun等[47 ] 以前人研究为基础, 对基于粒子滤波的SLAM算法框架做出完善, 提出Fast SLAM算法.Fast SLAM算法的核心思想是通过EKF算法估计路标的实际位置, 通过PF算法估计移动机器人的运动轨迹, 该算法能够有效提高定位精度. ...
基于改进粒子滤波的射频识别室内跟踪算法
1
2015
... 周武等[41 ] 提出一种改进的边缘粒子滤波定位与建图方法, 该方法结合了Marginal-SLAM算法与遗传算法, 通过最新观测信息对粒子集进行优化, 保留了粒子集多样性的特点, 提高了算法的运行效率与综合性能.吴培良等[42 ] 基于提议分布选择, 对粒子滤波算法做出改进, 通过对更接近状态后验密度函数进行推导求出其提议分布, 将单个粒子提议分布的权值与最新观测信息进行融合, 提高了改进边缘粒子滤波的估计准确度, 有效抑制了粒子退化现象.为解决各类非线性问题, Dellaert等[43 ] 提出蒙特卡罗粒子滤波定位算法, 该方法基于PF算法, 利用里程计与传感器进行定位, 将散乱粒子集表示为概率, 通过搜索散乱粒子得到相应的概率密度函数.石雪军等[44 ] 基于接收信号强度指示直接构建非线性状态空间模型, 通过马尔科夫链蒙特卡洛移动步骤对重采样系统进行改进, 该方法能够提高粒子多样性、跟踪精度及滤波性能.武斌等[45 ] 针对室内SLAM算法易受噪声干扰的问题, 提出一种改进无迹粒子滤波的室内移动目标定位算法, 通过多项式拟合修正信号观测强度, 利用价权函数抑制异常噪声的影响, 该方法能够有效提高系统的抗干扰能力与室内定位精度.Montemerlo等[46 ] 、Thrun等[47 ] 以前人研究为基础, 对基于粒子滤波的SLAM算法框架做出完善, 提出Fast SLAM算法.Fast SLAM算法的核心思想是通过EKF算法估计路标的实际位置, 通过PF算法估计移动机器人的运动轨迹, 该算法能够有效提高定位精度. ...
基于改进粒子滤波的射频识别室内跟踪算法
1
2015
... 周武等[41 ] 提出一种改进的边缘粒子滤波定位与建图方法, 该方法结合了Marginal-SLAM算法与遗传算法, 通过最新观测信息对粒子集进行优化, 保留了粒子集多样性的特点, 提高了算法的运行效率与综合性能.吴培良等[42 ] 基于提议分布选择, 对粒子滤波算法做出改进, 通过对更接近状态后验密度函数进行推导求出其提议分布, 将单个粒子提议分布的权值与最新观测信息进行融合, 提高了改进边缘粒子滤波的估计准确度, 有效抑制了粒子退化现象.为解决各类非线性问题, Dellaert等[43 ] 提出蒙特卡罗粒子滤波定位算法, 该方法基于PF算法, 利用里程计与传感器进行定位, 将散乱粒子集表示为概率, 通过搜索散乱粒子得到相应的概率密度函数.石雪军等[44 ] 基于接收信号强度指示直接构建非线性状态空间模型, 通过马尔科夫链蒙特卡洛移动步骤对重采样系统进行改进, 该方法能够提高粒子多样性、跟踪精度及滤波性能.武斌等[45 ] 针对室内SLAM算法易受噪声干扰的问题, 提出一种改进无迹粒子滤波的室内移动目标定位算法, 通过多项式拟合修正信号观测强度, 利用价权函数抑制异常噪声的影响, 该方法能够有效提高系统的抗干扰能力与室内定位精度.Montemerlo等[46 ] 、Thrun等[47 ] 以前人研究为基础, 对基于粒子滤波的SLAM算法框架做出完善, 提出Fast SLAM算法.Fast SLAM算法的核心思想是通过EKF算法估计路标的实际位置, 通过PF算法估计移动机器人的运动轨迹, 该算法能够有效提高定位精度. ...
改进无迹粒子滤波的室内移动目标定位
1
2021
... 周武等[41 ] 提出一种改进的边缘粒子滤波定位与建图方法, 该方法结合了Marginal-SLAM算法与遗传算法, 通过最新观测信息对粒子集进行优化, 保留了粒子集多样性的特点, 提高了算法的运行效率与综合性能.吴培良等[42 ] 基于提议分布选择, 对粒子滤波算法做出改进, 通过对更接近状态后验密度函数进行推导求出其提议分布, 将单个粒子提议分布的权值与最新观测信息进行融合, 提高了改进边缘粒子滤波的估计准确度, 有效抑制了粒子退化现象.为解决各类非线性问题, Dellaert等[43 ] 提出蒙特卡罗粒子滤波定位算法, 该方法基于PF算法, 利用里程计与传感器进行定位, 将散乱粒子集表示为概率, 通过搜索散乱粒子得到相应的概率密度函数.石雪军等[44 ] 基于接收信号强度指示直接构建非线性状态空间模型, 通过马尔科夫链蒙特卡洛移动步骤对重采样系统进行改进, 该方法能够提高粒子多样性、跟踪精度及滤波性能.武斌等[45 ] 针对室内SLAM算法易受噪声干扰的问题, 提出一种改进无迹粒子滤波的室内移动目标定位算法, 通过多项式拟合修正信号观测强度, 利用价权函数抑制异常噪声的影响, 该方法能够有效提高系统的抗干扰能力与室内定位精度.Montemerlo等[46 ] 、Thrun等[47 ] 以前人研究为基础, 对基于粒子滤波的SLAM算法框架做出完善, 提出Fast SLAM算法.Fast SLAM算法的核心思想是通过EKF算法估计路标的实际位置, 通过PF算法估计移动机器人的运动轨迹, 该算法能够有效提高定位精度. ...
改进无迹粒子滤波的室内移动目标定位
1
2021
... 周武等[41 ] 提出一种改进的边缘粒子滤波定位与建图方法, 该方法结合了Marginal-SLAM算法与遗传算法, 通过最新观测信息对粒子集进行优化, 保留了粒子集多样性的特点, 提高了算法的运行效率与综合性能.吴培良等[42 ] 基于提议分布选择, 对粒子滤波算法做出改进, 通过对更接近状态后验密度函数进行推导求出其提议分布, 将单个粒子提议分布的权值与最新观测信息进行融合, 提高了改进边缘粒子滤波的估计准确度, 有效抑制了粒子退化现象.为解决各类非线性问题, Dellaert等[43 ] 提出蒙特卡罗粒子滤波定位算法, 该方法基于PF算法, 利用里程计与传感器进行定位, 将散乱粒子集表示为概率, 通过搜索散乱粒子得到相应的概率密度函数.石雪军等[44 ] 基于接收信号强度指示直接构建非线性状态空间模型, 通过马尔科夫链蒙特卡洛移动步骤对重采样系统进行改进, 该方法能够提高粒子多样性、跟踪精度及滤波性能.武斌等[45 ] 针对室内SLAM算法易受噪声干扰的问题, 提出一种改进无迹粒子滤波的室内移动目标定位算法, 通过多项式拟合修正信号观测强度, 利用价权函数抑制异常噪声的影响, 该方法能够有效提高系统的抗干扰能力与室内定位精度.Montemerlo等[46 ] 、Thrun等[47 ] 以前人研究为基础, 对基于粒子滤波的SLAM算法框架做出完善, 提出Fast SLAM算法.Fast SLAM算法的核心思想是通过EKF算法估计路标的实际位置, 通过PF算法估计移动机器人的运动轨迹, 该算法能够有效提高定位精度. ...
1
... 周武等[41 ] 提出一种改进的边缘粒子滤波定位与建图方法, 该方法结合了Marginal-SLAM算法与遗传算法, 通过最新观测信息对粒子集进行优化, 保留了粒子集多样性的特点, 提高了算法的运行效率与综合性能.吴培良等[42 ] 基于提议分布选择, 对粒子滤波算法做出改进, 通过对更接近状态后验密度函数进行推导求出其提议分布, 将单个粒子提议分布的权值与最新观测信息进行融合, 提高了改进边缘粒子滤波的估计准确度, 有效抑制了粒子退化现象.为解决各类非线性问题, Dellaert等[43 ] 提出蒙特卡罗粒子滤波定位算法, 该方法基于PF算法, 利用里程计与传感器进行定位, 将散乱粒子集表示为概率, 通过搜索散乱粒子得到相应的概率密度函数.石雪军等[44 ] 基于接收信号强度指示直接构建非线性状态空间模型, 通过马尔科夫链蒙特卡洛移动步骤对重采样系统进行改进, 该方法能够提高粒子多样性、跟踪精度及滤波性能.武斌等[45 ] 针对室内SLAM算法易受噪声干扰的问题, 提出一种改进无迹粒子滤波的室内移动目标定位算法, 通过多项式拟合修正信号观测强度, 利用价权函数抑制异常噪声的影响, 该方法能够有效提高系统的抗干扰能力与室内定位精度.Montemerlo等[46 ] 、Thrun等[47 ] 以前人研究为基础, 对基于粒子滤波的SLAM算法框架做出完善, 提出Fast SLAM算法.Fast SLAM算法的核心思想是通过EKF算法估计路标的实际位置, 通过PF算法估计移动机器人的运动轨迹, 该算法能够有效提高定位精度. ...
1
... 周武等[41 ] 提出一种改进的边缘粒子滤波定位与建图方法, 该方法结合了Marginal-SLAM算法与遗传算法, 通过最新观测信息对粒子集进行优化, 保留了粒子集多样性的特点, 提高了算法的运行效率与综合性能.吴培良等[42 ] 基于提议分布选择, 对粒子滤波算法做出改进, 通过对更接近状态后验密度函数进行推导求出其提议分布, 将单个粒子提议分布的权值与最新观测信息进行融合, 提高了改进边缘粒子滤波的估计准确度, 有效抑制了粒子退化现象.为解决各类非线性问题, Dellaert等[43 ] 提出蒙特卡罗粒子滤波定位算法, 该方法基于PF算法, 利用里程计与传感器进行定位, 将散乱粒子集表示为概率, 通过搜索散乱粒子得到相应的概率密度函数.石雪军等[44 ] 基于接收信号强度指示直接构建非线性状态空间模型, 通过马尔科夫链蒙特卡洛移动步骤对重采样系统进行改进, 该方法能够提高粒子多样性、跟踪精度及滤波性能.武斌等[45 ] 针对室内SLAM算法易受噪声干扰的问题, 提出一种改进无迹粒子滤波的室内移动目标定位算法, 通过多项式拟合修正信号观测强度, 利用价权函数抑制异常噪声的影响, 该方法能够有效提高系统的抗干扰能力与室内定位精度.Montemerlo等[46 ] 、Thrun等[47 ] 以前人研究为基础, 对基于粒子滤波的SLAM算法框架做出完善, 提出Fast SLAM算法.Fast SLAM算法的核心思想是通过EKF算法估计路标的实际位置, 通过PF算法估计移动机器人的运动轨迹, 该算法能够有效提高定位精度. ...
Factoring the apping problem: mobile robot map-building in the hybrid spatial semantic hierarchy
1
2010
... 智能车周边的环境信息通过构建地图进行表示, 环境地图是智能车进行自定位与导航的依据.首先对周边环境进行感知并构建环境地图, 智能车基于已存储的环境模型, 通过内部及外部传感器对环境信息进行感知并与已经完成创建的环境地图进行匹配, 根据匹配结果进行自定位.当感知的环境信息与环境地图匹配成功时, 通过标定目标点并参考环境地图中的障碍物, 可以基于智能车当前位置对其进行路径规划.目前常用的环境地图表示形式可分为3种: 栅格地图、拓扑地图与几何信息地图[48 ] .选取环境地图种类时, 要充分考虑地图精度与机器人感知目标的精度、地图所展现的特征应与传感器感知的数据类型相匹配.下面对拓扑地图、几何信息地图以及栅格地图做出详细介绍. ...
智能移动机器人同步定位与地图构建算法研究
1
2013
... 拓扑地图是一种统计地图, 能够保持点与线之间正确的相对位置关系, 但原图的形状、距离、方向等信息的准确性不能保证, 拓扑地图也属于抽象地图的一种.拓扑地图由Brooks等提出, 为其后的研究奠定了一套理论基础[49 ] .拓扑地图由于其较高的抽象度, 非常适用于范围较广且障碍物类型较少的场景, 同时拓扑地图具备占用内存小、计算效率高、对路径的规划更为高效以及支持许多已经发展的较为成熟的算法等优点[50 ] .由于拓扑图的识别匹配功能以形成的拓扑节点为基础, 当环境中存在2个相似物体时, 通过拓扑图很难对其进行区分辨认, 同时拓扑地图会忽略各节点之间的最短可行路径, 从而大大降低了智能车路径规划的最优性.针对传感器感知信息存在模糊的情形, 很难根据模糊信息构建大型环境下的拓扑地图. ...
智能移动机器人同步定位与地图构建算法研究
1
2013
... 拓扑地图是一种统计地图, 能够保持点与线之间正确的相对位置关系, 但原图的形状、距离、方向等信息的准确性不能保证, 拓扑地图也属于抽象地图的一种.拓扑地图由Brooks等提出, 为其后的研究奠定了一套理论基础[49 ] .拓扑地图由于其较高的抽象度, 非常适用于范围较广且障碍物类型较少的场景, 同时拓扑地图具备占用内存小、计算效率高、对路径的规划更为高效以及支持许多已经发展的较为成熟的算法等优点[50 ] .由于拓扑图的识别匹配功能以形成的拓扑节点为基础, 当环境中存在2个相似物体时, 通过拓扑图很难对其进行区分辨认, 同时拓扑地图会忽略各节点之间的最短可行路径, 从而大大降低了智能车路径规划的最优性.针对传感器感知信息存在模糊的情形, 很难根据模糊信息构建大型环境下的拓扑地图. ...
1
... 拓扑地图是一种统计地图, 能够保持点与线之间正确的相对位置关系, 但原图的形状、距离、方向等信息的准确性不能保证, 拓扑地图也属于抽象地图的一种.拓扑地图由Brooks等提出, 为其后的研究奠定了一套理论基础[49 ] .拓扑地图由于其较高的抽象度, 非常适用于范围较广且障碍物类型较少的场景, 同时拓扑地图具备占用内存小、计算效率高、对路径的规划更为高效以及支持许多已经发展的较为成熟的算法等优点[50 ] .由于拓扑图的识别匹配功能以形成的拓扑节点为基础, 当环境中存在2个相似物体时, 通过拓扑图很难对其进行区分辨认, 同时拓扑地图会忽略各节点之间的最短可行路径, 从而大大降低了智能车路径规划的最优性.针对传感器感知信息存在模糊的情形, 很难根据模糊信息构建大型环境下的拓扑地图. ...
基于Hough变换的激光几何特征地图提取方法
1
2018
... 几何信息地图也称特征地图, 智能车通过传感器对周边环境进行感知, 从获取的环境信息中提取有用信息并以几何特征的形式展示到地图中, 几何特征信息有多种表示形式, 例如线段、曲线等.几何特征能够简化环境中各物体的信息, 从而更直观地观测地图中障碍物的信息, 便于进行位姿估计、目标识别与提取[51 ] .同时定位与建图功能涉及到局部地图与全局地图, 智能车需要将局部地图与全局地图进行比对, 以便进行环境特征的关联.几何信息地图在局部区域中表现出目标高精度识别与计算量较小等优点, 但在广域环境内难以保持高精度的坐标信息[52 ] .同时基于特征地图进行数据关联的挑战性极大, 数据关联的准确性也难以得到保障.对几何信息进行提取需要额外处理感知信息, 并且处理过程需要大量数据支撑才能获得较为理想的提取结果.考虑到上述几何信息地图在特征提取与数据关联方面存在误差, 在目前的研究中, 几何信息地图的使用较少. ...
基于Hough变换的激光几何特征地图提取方法
1
2018
... 几何信息地图也称特征地图, 智能车通过传感器对周边环境进行感知, 从获取的环境信息中提取有用信息并以几何特征的形式展示到地图中, 几何特征信息有多种表示形式, 例如线段、曲线等.几何特征能够简化环境中各物体的信息, 从而更直观地观测地图中障碍物的信息, 便于进行位姿估计、目标识别与提取[51 ] .同时定位与建图功能涉及到局部地图与全局地图, 智能车需要将局部地图与全局地图进行比对, 以便进行环境特征的关联.几何信息地图在局部区域中表现出目标高精度识别与计算量较小等优点, 但在广域环境内难以保持高精度的坐标信息[52 ] .同时基于特征地图进行数据关联的挑战性极大, 数据关联的准确性也难以得到保障.对几何信息进行提取需要额外处理感知信息, 并且处理过程需要大量数据支撑才能获得较为理想的提取结果.考虑到上述几何信息地图在特征提取与数据关联方面存在误差, 在目前的研究中, 几何信息地图的使用较少. ...
Role of deep learning in loop closure detection for visual and lidar SLAM: a survey
1
2021
... 几何信息地图也称特征地图, 智能车通过传感器对周边环境进行感知, 从获取的环境信息中提取有用信息并以几何特征的形式展示到地图中, 几何特征信息有多种表示形式, 例如线段、曲线等.几何特征能够简化环境中各物体的信息, 从而更直观地观测地图中障碍物的信息, 便于进行位姿估计、目标识别与提取[51 ] .同时定位与建图功能涉及到局部地图与全局地图, 智能车需要将局部地图与全局地图进行比对, 以便进行环境特征的关联.几何信息地图在局部区域中表现出目标高精度识别与计算量较小等优点, 但在广域环境内难以保持高精度的坐标信息[52 ] .同时基于特征地图进行数据关联的挑战性极大, 数据关联的准确性也难以得到保障.对几何信息进行提取需要额外处理感知信息, 并且处理过程需要大量数据支撑才能获得较为理想的提取结果.考虑到上述几何信息地图在特征提取与数据关联方面存在误差, 在目前的研究中, 几何信息地图的使用较少. ...
1
... 栅格地图由Moravec和Elfes等首次提出, 随后Elfes对栅格地图表示法进行了更深入研究.栅格地图的创建不受环境地形影响,环境的感知数据易于保存与维护,方便移动智能车进行自定位与路径规划,且现实环境的目标信息精确度随地图分辨率增大而增大.因此, 栅格地图更适用于超声波传感器和激光雷达[53 ] .当环境范围较大、环境中包含的信息较多时, 栅格地图会保存几乎所有的障碍物信息, 信息维护和更新的难度加大, 目标识别的效果也会变差.考虑到定位的过程中存在很大的搜索空间, 实现实时应用需要较为成熟的简化算法进行支撑.但目前栅格地图表示法仍是建图技术中常用方法之一. ...
Fusion of IMU and vision for absolute scale estimation in monocular SLAM
1
2011
... 视觉SLAM常与IMU配合使用以提高估计精度.IMU短时间内对快速运动的准确估计能够弥补相机对于快速运动物体识别的短板, 从而更好地处理运动物体高速行驶和旋转等情况.目前针对IMU与相机结合的SLAM研究已有不少[54 -58 ] .潘林豪等[59 ] 融合了双目视觉与惯导信息, 提出了一种高效的视觉里程计算法, 通过惯导信息辅助光流法进行帧间特征点跟踪, 采用最小化图像光度误差获取局部地图点与像素点的关系, 后端局部地图优化提取关键帧特征, 通过光束平差法对关键帧位姿、陀螺仪、地图点位置等信息进行滑窗优化, 较大程度上提高了位姿跟踪的实时性.种一帆等[60 ] 通过结合惯导数据与双目相机视觉信息进行高精度地图的构建, 简化的双目模型与选择性地删除部分图像帧信息, 减少了多余测量值的计算量, 提高了系统的工作效率.Bloesch等[61 ] 提出了一种基于直接法并利用迭代扩展卡尔曼滤波器的单目视觉惯性里程计, 考虑光度误差与图像块, 提高了系统的鲁棒性与跟踪性能.Schneider等[62 ] 提出了Maplab框架, 完善了SLAM框架, 具备回环检测与重定位的功能.视觉里程计的关键技术在于特征的相应操作、帧间位姿估计及降低漂移.特征模块中包含特征检测和特征匹配, 其中进行特征检测的算法主要有SUSAN、Moravee、SIFT、Harris、FAST等, 特征匹配则基于SIFT或SURF等算法运行[63 ] .帧间位姿估计通常采用外点排除与运动估计2种方法, 外点排除的经典算法是RANSAC算法, 运动估计则基于特征点的维度特征对应选取3D-2D、2D-2D算法[63 ] .系统减小漂移通常采用滤波器法或非线性优化法. ...
Visual-inertial monocular SLAM with map reuse
0
2017
1
... 视觉SLAM常与IMU配合使用以提高估计精度.IMU短时间内对快速运动的准确估计能够弥补相机对于快速运动物体识别的短板, 从而更好地处理运动物体高速行驶和旋转等情况.目前针对IMU与相机结合的SLAM研究已有不少[54 -58 ] .潘林豪等[59 ] 融合了双目视觉与惯导信息, 提出了一种高效的视觉里程计算法, 通过惯导信息辅助光流法进行帧间特征点跟踪, 采用最小化图像光度误差获取局部地图点与像素点的关系, 后端局部地图优化提取关键帧特征, 通过光束平差法对关键帧位姿、陀螺仪、地图点位置等信息进行滑窗优化, 较大程度上提高了位姿跟踪的实时性.种一帆等[60 ] 通过结合惯导数据与双目相机视觉信息进行高精度地图的构建, 简化的双目模型与选择性地删除部分图像帧信息, 减少了多余测量值的计算量, 提高了系统的工作效率.Bloesch等[61 ] 提出了一种基于直接法并利用迭代扩展卡尔曼滤波器的单目视觉惯性里程计, 考虑光度误差与图像块, 提高了系统的鲁棒性与跟踪性能.Schneider等[62 ] 提出了Maplab框架, 完善了SLAM框架, 具备回环检测与重定位的功能.视觉里程计的关键技术在于特征的相应操作、帧间位姿估计及降低漂移.特征模块中包含特征检测和特征匹配, 其中进行特征检测的算法主要有SUSAN、Moravee、SIFT、Harris、FAST等, 特征匹配则基于SIFT或SURF等算法运行[63 ] .帧间位姿估计通常采用外点排除与运动估计2种方法, 外点排除的经典算法是RANSAC算法, 运动估计则基于特征点的维度特征对应选取3D-2D、2D-2D算法[63 ] .系统减小漂移通常采用滤波器法或非线性优化法. ...
融合双目视觉与惯导信息的高效视觉里程计算法
1
2021
... 视觉SLAM常与IMU配合使用以提高估计精度.IMU短时间内对快速运动的准确估计能够弥补相机对于快速运动物体识别的短板, 从而更好地处理运动物体高速行驶和旋转等情况.目前针对IMU与相机结合的SLAM研究已有不少[54 -58 ] .潘林豪等[59 ] 融合了双目视觉与惯导信息, 提出了一种高效的视觉里程计算法, 通过惯导信息辅助光流法进行帧间特征点跟踪, 采用最小化图像光度误差获取局部地图点与像素点的关系, 后端局部地图优化提取关键帧特征, 通过光束平差法对关键帧位姿、陀螺仪、地图点位置等信息进行滑窗优化, 较大程度上提高了位姿跟踪的实时性.种一帆等[60 ] 通过结合惯导数据与双目相机视觉信息进行高精度地图的构建, 简化的双目模型与选择性地删除部分图像帧信息, 减少了多余测量值的计算量, 提高了系统的工作效率.Bloesch等[61 ] 提出了一种基于直接法并利用迭代扩展卡尔曼滤波器的单目视觉惯性里程计, 考虑光度误差与图像块, 提高了系统的鲁棒性与跟踪性能.Schneider等[62 ] 提出了Maplab框架, 完善了SLAM框架, 具备回环检测与重定位的功能.视觉里程计的关键技术在于特征的相应操作、帧间位姿估计及降低漂移.特征模块中包含特征检测和特征匹配, 其中进行特征检测的算法主要有SUSAN、Moravee、SIFT、Harris、FAST等, 特征匹配则基于SIFT或SURF等算法运行[63 ] .帧间位姿估计通常采用外点排除与运动估计2种方法, 外点排除的经典算法是RANSAC算法, 运动估计则基于特征点的维度特征对应选取3D-2D、2D-2D算法[63 ] .系统减小漂移通常采用滤波器法或非线性优化法. ...
融合双目视觉与惯导信息的高效视觉里程计算法
1
2021
... 视觉SLAM常与IMU配合使用以提高估计精度.IMU短时间内对快速运动的准确估计能够弥补相机对于快速运动物体识别的短板, 从而更好地处理运动物体高速行驶和旋转等情况.目前针对IMU与相机结合的SLAM研究已有不少[54 -58 ] .潘林豪等[59 ] 融合了双目视觉与惯导信息, 提出了一种高效的视觉里程计算法, 通过惯导信息辅助光流法进行帧间特征点跟踪, 采用最小化图像光度误差获取局部地图点与像素点的关系, 后端局部地图优化提取关键帧特征, 通过光束平差法对关键帧位姿、陀螺仪、地图点位置等信息进行滑窗优化, 较大程度上提高了位姿跟踪的实时性.种一帆等[60 ] 通过结合惯导数据与双目相机视觉信息进行高精度地图的构建, 简化的双目模型与选择性地删除部分图像帧信息, 减少了多余测量值的计算量, 提高了系统的工作效率.Bloesch等[61 ] 提出了一种基于直接法并利用迭代扩展卡尔曼滤波器的单目视觉惯性里程计, 考虑光度误差与图像块, 提高了系统的鲁棒性与跟踪性能.Schneider等[62 ] 提出了Maplab框架, 完善了SLAM框架, 具备回环检测与重定位的功能.视觉里程计的关键技术在于特征的相应操作、帧间位姿估计及降低漂移.特征模块中包含特征检测和特征匹配, 其中进行特征检测的算法主要有SUSAN、Moravee、SIFT、Harris、FAST等, 特征匹配则基于SIFT或SURF等算法运行[63 ] .帧间位姿估计通常采用外点排除与运动估计2种方法, 外点排除的经典算法是RANSAC算法, 运动估计则基于特征点的维度特征对应选取3D-2D、2D-2D算法[63 ] .系统减小漂移通常采用滤波器法或非线性优化法. ...
半直接法与IMU融合的双目视觉里程计
1
2021
... 视觉SLAM常与IMU配合使用以提高估计精度.IMU短时间内对快速运动的准确估计能够弥补相机对于快速运动物体识别的短板, 从而更好地处理运动物体高速行驶和旋转等情况.目前针对IMU与相机结合的SLAM研究已有不少[54 -58 ] .潘林豪等[59 ] 融合了双目视觉与惯导信息, 提出了一种高效的视觉里程计算法, 通过惯导信息辅助光流法进行帧间特征点跟踪, 采用最小化图像光度误差获取局部地图点与像素点的关系, 后端局部地图优化提取关键帧特征, 通过光束平差法对关键帧位姿、陀螺仪、地图点位置等信息进行滑窗优化, 较大程度上提高了位姿跟踪的实时性.种一帆等[60 ] 通过结合惯导数据与双目相机视觉信息进行高精度地图的构建, 简化的双目模型与选择性地删除部分图像帧信息, 减少了多余测量值的计算量, 提高了系统的工作效率.Bloesch等[61 ] 提出了一种基于直接法并利用迭代扩展卡尔曼滤波器的单目视觉惯性里程计, 考虑光度误差与图像块, 提高了系统的鲁棒性与跟踪性能.Schneider等[62 ] 提出了Maplab框架, 完善了SLAM框架, 具备回环检测与重定位的功能.视觉里程计的关键技术在于特征的相应操作、帧间位姿估计及降低漂移.特征模块中包含特征检测和特征匹配, 其中进行特征检测的算法主要有SUSAN、Moravee、SIFT、Harris、FAST等, 特征匹配则基于SIFT或SURF等算法运行[63 ] .帧间位姿估计通常采用外点排除与运动估计2种方法, 外点排除的经典算法是RANSAC算法, 运动估计则基于特征点的维度特征对应选取3D-2D、2D-2D算法[63 ] .系统减小漂移通常采用滤波器法或非线性优化法. ...
半直接法与IMU融合的双目视觉里程计
1
2021
... 视觉SLAM常与IMU配合使用以提高估计精度.IMU短时间内对快速运动的准确估计能够弥补相机对于快速运动物体识别的短板, 从而更好地处理运动物体高速行驶和旋转等情况.目前针对IMU与相机结合的SLAM研究已有不少[54 -58 ] .潘林豪等[59 ] 融合了双目视觉与惯导信息, 提出了一种高效的视觉里程计算法, 通过惯导信息辅助光流法进行帧间特征点跟踪, 采用最小化图像光度误差获取局部地图点与像素点的关系, 后端局部地图优化提取关键帧特征, 通过光束平差法对关键帧位姿、陀螺仪、地图点位置等信息进行滑窗优化, 较大程度上提高了位姿跟踪的实时性.种一帆等[60 ] 通过结合惯导数据与双目相机视觉信息进行高精度地图的构建, 简化的双目模型与选择性地删除部分图像帧信息, 减少了多余测量值的计算量, 提高了系统的工作效率.Bloesch等[61 ] 提出了一种基于直接法并利用迭代扩展卡尔曼滤波器的单目视觉惯性里程计, 考虑光度误差与图像块, 提高了系统的鲁棒性与跟踪性能.Schneider等[62 ] 提出了Maplab框架, 完善了SLAM框架, 具备回环检测与重定位的功能.视觉里程计的关键技术在于特征的相应操作、帧间位姿估计及降低漂移.特征模块中包含特征检测和特征匹配, 其中进行特征检测的算法主要有SUSAN、Moravee、SIFT、Harris、FAST等, 特征匹配则基于SIFT或SURF等算法运行[63 ] .帧间位姿估计通常采用外点排除与运动估计2种方法, 外点排除的经典算法是RANSAC算法, 运动估计则基于特征点的维度特征对应选取3D-2D、2D-2D算法[63 ] .系统减小漂移通常采用滤波器法或非线性优化法. ...
1
... 视觉SLAM常与IMU配合使用以提高估计精度.IMU短时间内对快速运动的准确估计能够弥补相机对于快速运动物体识别的短板, 从而更好地处理运动物体高速行驶和旋转等情况.目前针对IMU与相机结合的SLAM研究已有不少[54 -58 ] .潘林豪等[59 ] 融合了双目视觉与惯导信息, 提出了一种高效的视觉里程计算法, 通过惯导信息辅助光流法进行帧间特征点跟踪, 采用最小化图像光度误差获取局部地图点与像素点的关系, 后端局部地图优化提取关键帧特征, 通过光束平差法对关键帧位姿、陀螺仪、地图点位置等信息进行滑窗优化, 较大程度上提高了位姿跟踪的实时性.种一帆等[60 ] 通过结合惯导数据与双目相机视觉信息进行高精度地图的构建, 简化的双目模型与选择性地删除部分图像帧信息, 减少了多余测量值的计算量, 提高了系统的工作效率.Bloesch等[61 ] 提出了一种基于直接法并利用迭代扩展卡尔曼滤波器的单目视觉惯性里程计, 考虑光度误差与图像块, 提高了系统的鲁棒性与跟踪性能.Schneider等[62 ] 提出了Maplab框架, 完善了SLAM框架, 具备回环检测与重定位的功能.视觉里程计的关键技术在于特征的相应操作、帧间位姿估计及降低漂移.特征模块中包含特征检测和特征匹配, 其中进行特征检测的算法主要有SUSAN、Moravee、SIFT、Harris、FAST等, 特征匹配则基于SIFT或SURF等算法运行[63 ] .帧间位姿估计通常采用外点排除与运动估计2种方法, 外点排除的经典算法是RANSAC算法, 运动估计则基于特征点的维度特征对应选取3D-2D、2D-2D算法[63 ] .系统减小漂移通常采用滤波器法或非线性优化法. ...
1
... 视觉SLAM常与IMU配合使用以提高估计精度.IMU短时间内对快速运动的准确估计能够弥补相机对于快速运动物体识别的短板, 从而更好地处理运动物体高速行驶和旋转等情况.目前针对IMU与相机结合的SLAM研究已有不少[54 -58 ] .潘林豪等[59 ] 融合了双目视觉与惯导信息, 提出了一种高效的视觉里程计算法, 通过惯导信息辅助光流法进行帧间特征点跟踪, 采用最小化图像光度误差获取局部地图点与像素点的关系, 后端局部地图优化提取关键帧特征, 通过光束平差法对关键帧位姿、陀螺仪、地图点位置等信息进行滑窗优化, 较大程度上提高了位姿跟踪的实时性.种一帆等[60 ] 通过结合惯导数据与双目相机视觉信息进行高精度地图的构建, 简化的双目模型与选择性地删除部分图像帧信息, 减少了多余测量值的计算量, 提高了系统的工作效率.Bloesch等[61 ] 提出了一种基于直接法并利用迭代扩展卡尔曼滤波器的单目视觉惯性里程计, 考虑光度误差与图像块, 提高了系统的鲁棒性与跟踪性能.Schneider等[62 ] 提出了Maplab框架, 完善了SLAM框架, 具备回环检测与重定位的功能.视觉里程计的关键技术在于特征的相应操作、帧间位姿估计及降低漂移.特征模块中包含特征检测和特征匹配, 其中进行特征检测的算法主要有SUSAN、Moravee、SIFT、Harris、FAST等, 特征匹配则基于SIFT或SURF等算法运行[63 ] .帧间位姿估计通常采用外点排除与运动估计2种方法, 外点排除的经典算法是RANSAC算法, 运动估计则基于特征点的维度特征对应选取3D-2D、2D-2D算法[63 ] .系统减小漂移通常采用滤波器法或非线性优化法. ...
视觉里程计算法研究综述
2
2019
... 视觉SLAM常与IMU配合使用以提高估计精度.IMU短时间内对快速运动的准确估计能够弥补相机对于快速运动物体识别的短板, 从而更好地处理运动物体高速行驶和旋转等情况.目前针对IMU与相机结合的SLAM研究已有不少[54 -58 ] .潘林豪等[59 ] 融合了双目视觉与惯导信息, 提出了一种高效的视觉里程计算法, 通过惯导信息辅助光流法进行帧间特征点跟踪, 采用最小化图像光度误差获取局部地图点与像素点的关系, 后端局部地图优化提取关键帧特征, 通过光束平差法对关键帧位姿、陀螺仪、地图点位置等信息进行滑窗优化, 较大程度上提高了位姿跟踪的实时性.种一帆等[60 ] 通过结合惯导数据与双目相机视觉信息进行高精度地图的构建, 简化的双目模型与选择性地删除部分图像帧信息, 减少了多余测量值的计算量, 提高了系统的工作效率.Bloesch等[61 ] 提出了一种基于直接法并利用迭代扩展卡尔曼滤波器的单目视觉惯性里程计, 考虑光度误差与图像块, 提高了系统的鲁棒性与跟踪性能.Schneider等[62 ] 提出了Maplab框架, 完善了SLAM框架, 具备回环检测与重定位的功能.视觉里程计的关键技术在于特征的相应操作、帧间位姿估计及降低漂移.特征模块中包含特征检测和特征匹配, 其中进行特征检测的算法主要有SUSAN、Moravee、SIFT、Harris、FAST等, 特征匹配则基于SIFT或SURF等算法运行[63 ] .帧间位姿估计通常采用外点排除与运动估计2种方法, 外点排除的经典算法是RANSAC算法, 运动估计则基于特征点的维度特征对应选取3D-2D、2D-2D算法[63 ] .系统减小漂移通常采用滤波器法或非线性优化法. ...
... [63 ].系统减小漂移通常采用滤波器法或非线性优化法. ...
视觉里程计算法研究综述
2
2019
... 视觉SLAM常与IMU配合使用以提高估计精度.IMU短时间内对快速运动的准确估计能够弥补相机对于快速运动物体识别的短板, 从而更好地处理运动物体高速行驶和旋转等情况.目前针对IMU与相机结合的SLAM研究已有不少[54 -58 ] .潘林豪等[59 ] 融合了双目视觉与惯导信息, 提出了一种高效的视觉里程计算法, 通过惯导信息辅助光流法进行帧间特征点跟踪, 采用最小化图像光度误差获取局部地图点与像素点的关系, 后端局部地图优化提取关键帧特征, 通过光束平差法对关键帧位姿、陀螺仪、地图点位置等信息进行滑窗优化, 较大程度上提高了位姿跟踪的实时性.种一帆等[60 ] 通过结合惯导数据与双目相机视觉信息进行高精度地图的构建, 简化的双目模型与选择性地删除部分图像帧信息, 减少了多余测量值的计算量, 提高了系统的工作效率.Bloesch等[61 ] 提出了一种基于直接法并利用迭代扩展卡尔曼滤波器的单目视觉惯性里程计, 考虑光度误差与图像块, 提高了系统的鲁棒性与跟踪性能.Schneider等[62 ] 提出了Maplab框架, 完善了SLAM框架, 具备回环检测与重定位的功能.视觉里程计的关键技术在于特征的相应操作、帧间位姿估计及降低漂移.特征模块中包含特征检测和特征匹配, 其中进行特征检测的算法主要有SUSAN、Moravee、SIFT、Harris、FAST等, 特征匹配则基于SIFT或SURF等算法运行[63 ] .帧间位姿估计通常采用外点排除与运动估计2种方法, 外点排除的经典算法是RANSAC算法, 运动估计则基于特征点的维度特征对应选取3D-2D、2D-2D算法[63 ] .系统减小漂移通常采用滤波器法或非线性优化法. ...
... [63 ].系统减小漂移通常采用滤波器法或非线性优化法. ...
1
... Ye等[64 ] 采用基于图优化的算法, 将激光雷达与IMU进行数据融合, 提高了建图与定位的精度, 但经实际测试, 该算法计算量过大, 耗时过久.庞帆等[65 ] 突破动态障碍物对实时定位和建图的影响, 增设动态障碍物提取与提出功能, 基于特征点划分类别, 按照设定的步骤进行点云匹配和求解位姿, 减少系统的计算耗时, 同时利用EKF将点云帧间匹配与IMU的积分信息进行融合, 提高了定位的精度.张艳国等[66 ] 通过融合IMU与激光雷达点云数据, 基于有效历史点云及其检测结果获得更完善的环境感知信息, 有效解决了机关雷达点云数据稀疏的问题, 提高了激光SLAM系统的目标检测性能.Geneva等[67 ] 基于IMU与激光雷达开发了一套新的系统, 该系统能够基于图优化功能完成惯性预积分测量值与3D点云数据的融合, 实现了厘米级的室内移动机器人高精度定位与导航.除此之外, 还有不少学者对多激光雷达的融合进行研究[68 -70 ] . ...
激光雷达惯导耦合的里程计与建图方法
1
2021
... Ye等[64 ] 采用基于图优化的算法, 将激光雷达与IMU进行数据融合, 提高了建图与定位的精度, 但经实际测试, 该算法计算量过大, 耗时过久.庞帆等[65 ] 突破动态障碍物对实时定位和建图的影响, 增设动态障碍物提取与提出功能, 基于特征点划分类别, 按照设定的步骤进行点云匹配和求解位姿, 减少系统的计算耗时, 同时利用EKF将点云帧间匹配与IMU的积分信息进行融合, 提高了定位的精度.张艳国等[66 ] 通过融合IMU与激光雷达点云数据, 基于有效历史点云及其检测结果获得更完善的环境感知信息, 有效解决了机关雷达点云数据稀疏的问题, 提高了激光SLAM系统的目标检测性能.Geneva等[67 ] 基于IMU与激光雷达开发了一套新的系统, 该系统能够基于图优化功能完成惯性预积分测量值与3D点云数据的融合, 实现了厘米级的室内移动机器人高精度定位与导航.除此之外, 还有不少学者对多激光雷达的融合进行研究[68 -70 ] . ...
激光雷达惯导耦合的里程计与建图方法
1
2021
... Ye等[64 ] 采用基于图优化的算法, 将激光雷达与IMU进行数据融合, 提高了建图与定位的精度, 但经实际测试, 该算法计算量过大, 耗时过久.庞帆等[65 ] 突破动态障碍物对实时定位和建图的影响, 增设动态障碍物提取与提出功能, 基于特征点划分类别, 按照设定的步骤进行点云匹配和求解位姿, 减少系统的计算耗时, 同时利用EKF将点云帧间匹配与IMU的积分信息进行融合, 提高了定位的精度.张艳国等[66 ] 通过融合IMU与激光雷达点云数据, 基于有效历史点云及其检测结果获得更完善的环境感知信息, 有效解决了机关雷达点云数据稀疏的问题, 提高了激光SLAM系统的目标检测性能.Geneva等[67 ] 基于IMU与激光雷达开发了一套新的系统, 该系统能够基于图优化功能完成惯性预积分测量值与3D点云数据的融合, 实现了厘米级的室内移动机器人高精度定位与导航.除此之外, 还有不少学者对多激光雷达的融合进行研究[68 -70 ] . ...
基于惯性测量单元的激光雷达点云融合方法
1
2018
... Ye等[64 ] 采用基于图优化的算法, 将激光雷达与IMU进行数据融合, 提高了建图与定位的精度, 但经实际测试, 该算法计算量过大, 耗时过久.庞帆等[65 ] 突破动态障碍物对实时定位和建图的影响, 增设动态障碍物提取与提出功能, 基于特征点划分类别, 按照设定的步骤进行点云匹配和求解位姿, 减少系统的计算耗时, 同时利用EKF将点云帧间匹配与IMU的积分信息进行融合, 提高了定位的精度.张艳国等[66 ] 通过融合IMU与激光雷达点云数据, 基于有效历史点云及其检测结果获得更完善的环境感知信息, 有效解决了机关雷达点云数据稀疏的问题, 提高了激光SLAM系统的目标检测性能.Geneva等[67 ] 基于IMU与激光雷达开发了一套新的系统, 该系统能够基于图优化功能完成惯性预积分测量值与3D点云数据的融合, 实现了厘米级的室内移动机器人高精度定位与导航.除此之外, 还有不少学者对多激光雷达的融合进行研究[68 -70 ] . ...
基于惯性测量单元的激光雷达点云融合方法
1
2018
... Ye等[64 ] 采用基于图优化的算法, 将激光雷达与IMU进行数据融合, 提高了建图与定位的精度, 但经实际测试, 该算法计算量过大, 耗时过久.庞帆等[65 ] 突破动态障碍物对实时定位和建图的影响, 增设动态障碍物提取与提出功能, 基于特征点划分类别, 按照设定的步骤进行点云匹配和求解位姿, 减少系统的计算耗时, 同时利用EKF将点云帧间匹配与IMU的积分信息进行融合, 提高了定位的精度.张艳国等[66 ] 通过融合IMU与激光雷达点云数据, 基于有效历史点云及其检测结果获得更完善的环境感知信息, 有效解决了机关雷达点云数据稀疏的问题, 提高了激光SLAM系统的目标检测性能.Geneva等[67 ] 基于IMU与激光雷达开发了一套新的系统, 该系统能够基于图优化功能完成惯性预积分测量值与3D点云数据的融合, 实现了厘米级的室内移动机器人高精度定位与导航.除此之外, 还有不少学者对多激光雷达的融合进行研究[68 -70 ] . ...
1
... Ye等[64 ] 采用基于图优化的算法, 将激光雷达与IMU进行数据融合, 提高了建图与定位的精度, 但经实际测试, 该算法计算量过大, 耗时过久.庞帆等[65 ] 突破动态障碍物对实时定位和建图的影响, 增设动态障碍物提取与提出功能, 基于特征点划分类别, 按照设定的步骤进行点云匹配和求解位姿, 减少系统的计算耗时, 同时利用EKF将点云帧间匹配与IMU的积分信息进行融合, 提高了定位的精度.张艳国等[66 ] 通过融合IMU与激光雷达点云数据, 基于有效历史点云及其检测结果获得更完善的环境感知信息, 有效解决了机关雷达点云数据稀疏的问题, 提高了激光SLAM系统的目标检测性能.Geneva等[67 ] 基于IMU与激光雷达开发了一套新的系统, 该系统能够基于图优化功能完成惯性预积分测量值与3D点云数据的融合, 实现了厘米级的室内移动机器人高精度定位与导航.除此之外, 还有不少学者对多激光雷达的融合进行研究[68 -70 ] . ...
Revolution and rotation-based method for roadside LiDAR data integration
1
2019
... Ye等[64 ] 采用基于图优化的算法, 将激光雷达与IMU进行数据融合, 提高了建图与定位的精度, 但经实际测试, 该算法计算量过大, 耗时过久.庞帆等[65 ] 突破动态障碍物对实时定位和建图的影响, 增设动态障碍物提取与提出功能, 基于特征点划分类别, 按照设定的步骤进行点云匹配和求解位姿, 减少系统的计算耗时, 同时利用EKF将点云帧间匹配与IMU的积分信息进行融合, 提高了定位的精度.张艳国等[66 ] 通过融合IMU与激光雷达点云数据, 基于有效历史点云及其检测结果获得更完善的环境感知信息, 有效解决了机关雷达点云数据稀疏的问题, 提高了激光SLAM系统的目标检测性能.Geneva等[67 ] 基于IMU与激光雷达开发了一套新的系统, 该系统能够基于图优化功能完成惯性预积分测量值与3D点云数据的融合, 实现了厘米级的室内移动机器人高精度定位与导航.除此之外, 还有不少学者对多激光雷达的融合进行研究[68 -70 ] . ...
Points registration for roadside LiDAR sensors
0
2019
Data registration with ground points for roadside LiDAR sensors
1
2019
... Ye等[64 ] 采用基于图优化的算法, 将激光雷达与IMU进行数据融合, 提高了建图与定位的精度, 但经实际测试, 该算法计算量过大, 耗时过久.庞帆等[65 ] 突破动态障碍物对实时定位和建图的影响, 增设动态障碍物提取与提出功能, 基于特征点划分类别, 按照设定的步骤进行点云匹配和求解位姿, 减少系统的计算耗时, 同时利用EKF将点云帧间匹配与IMU的积分信息进行融合, 提高了定位的精度.张艳国等[66 ] 通过融合IMU与激光雷达点云数据, 基于有效历史点云及其检测结果获得更完善的环境感知信息, 有效解决了机关雷达点云数据稀疏的问题, 提高了激光SLAM系统的目标检测性能.Geneva等[67 ] 基于IMU与激光雷达开发了一套新的系统, 该系统能够基于图优化功能完成惯性预积分测量值与3D点云数据的融合, 实现了厘米级的室内移动机器人高精度定位与导航.除此之外, 还有不少学者对多激光雷达的融合进行研究[68 -70 ] . ...
1
... 作为SLAM技术中两大核心传感器, 激光雷达与相机的融合使用逐渐成为当前研究的热点及难点问题.目前已有专家学者将相机数据与激光雷达数据进行融合[71 -74 ] .文献[75 ]提出一种基于直接法的SLAM系统, 通过基于滑动窗口的跟踪方法将单目相机与激光雷达数据结合, 集成深度信息后通过帧间匹配, 提高运动估计精度保障实时性能.Chen等[76 ] 将2D激光雷达垂直安装在机器人上并配以深度相机进行数据采集, 构建出高精度地图, 但该方法定位准确度较低.Huang等[77 ] 采用相机信息并通过帧间匹配对点云之间的数据关联进行约束, 通过迭代最近点法提高了运动轨迹估计的准确性, 但所构建的地图精度较低.Ding等[78 ] 采用混合光束法提高地图构建的精度, 但该方法计算负荷较大, 严重制约系统运行的效率.Zhang等[79 ] 结合激光雷达、摄像头与惯导, 提出一种耦合的SLAM方案, 经过实地验证, 该方案的位姿估计与地图精度较高, 实现了高精度的里程计.肖军浩等[80 ] 创新性地提出相机-激光雷达外参标定方法与遮挡识别算法, 基于重投影与光度的图像特征与三维点云数据, 构建基于特征点的混合残差位姿优化系统, 该方法避免了初始值问题, 同时标定与建图精度得到提高. ...
Mapping and localization in 3D environments using a 2D laser scanner and a stereo camera
0
2012
Three-dimensional indoor mobile mapping with fusion of two-dimensional laser scanner and RGBD camera data
0
2014
1
... 作为SLAM技术中两大核心传感器, 激光雷达与相机的融合使用逐渐成为当前研究的热点及难点问题.目前已有专家学者将相机数据与激光雷达数据进行融合[71 -74 ] .文献[75 ]提出一种基于直接法的SLAM系统, 通过基于滑动窗口的跟踪方法将单目相机与激光雷达数据结合, 集成深度信息后通过帧间匹配, 提高运动估计精度保障实时性能.Chen等[76 ] 将2D激光雷达垂直安装在机器人上并配以深度相机进行数据采集, 构建出高精度地图, 但该方法定位准确度较低.Huang等[77 ] 采用相机信息并通过帧间匹配对点云之间的数据关联进行约束, 通过迭代最近点法提高了运动轨迹估计的准确性, 但所构建的地图精度较低.Ding等[78 ] 采用混合光束法提高地图构建的精度, 但该方法计算负荷较大, 严重制约系统运行的效率.Zhang等[79 ] 结合激光雷达、摄像头与惯导, 提出一种耦合的SLAM方案, 经过实地验证, 该方案的位姿估计与地图精度较高, 实现了高精度的里程计.肖军浩等[80 ] 创新性地提出相机-激光雷达外参标定方法与遮挡识别算法, 基于重投影与光度的图像特征与三维点云数据, 构建基于特征点的混合残差位姿优化系统, 该方法避免了初始值问题, 同时标定与建图精度得到提高. ...
Low-drift and real-time lidar odometry and mapping
1
2017
... 作为SLAM技术中两大核心传感器, 激光雷达与相机的融合使用逐渐成为当前研究的热点及难点问题.目前已有专家学者将相机数据与激光雷达数据进行融合[71 -74 ] .文献[75 ]提出一种基于直接法的SLAM系统, 通过基于滑动窗口的跟踪方法将单目相机与激光雷达数据结合, 集成深度信息后通过帧间匹配, 提高运动估计精度保障实时性能.Chen等[76 ] 将2D激光雷达垂直安装在机器人上并配以深度相机进行数据采集, 构建出高精度地图, 但该方法定位准确度较低.Huang等[77 ] 采用相机信息并通过帧间匹配对点云之间的数据关联进行约束, 通过迭代最近点法提高了运动轨迹估计的准确性, 但所构建的地图精度较低.Ding等[78 ] 采用混合光束法提高地图构建的精度, 但该方法计算负荷较大, 严重制约系统运行的效率.Zhang等[79 ] 结合激光雷达、摄像头与惯导, 提出一种耦合的SLAM方案, 经过实地验证, 该方案的位姿估计与地图精度较高, 实现了高精度的里程计.肖军浩等[80 ] 创新性地提出相机-激光雷达外参标定方法与遮挡识别算法, 基于重投影与光度的图像特征与三维点云数据, 构建基于特征点的混合残差位姿优化系统, 该方法避免了初始值问题, 同时标定与建图精度得到提高. ...
1
... 作为SLAM技术中两大核心传感器, 激光雷达与相机的融合使用逐渐成为当前研究的热点及难点问题.目前已有专家学者将相机数据与激光雷达数据进行融合[71 -74 ] .文献[75 ]提出一种基于直接法的SLAM系统, 通过基于滑动窗口的跟踪方法将单目相机与激光雷达数据结合, 集成深度信息后通过帧间匹配, 提高运动估计精度保障实时性能.Chen等[76 ] 将2D激光雷达垂直安装在机器人上并配以深度相机进行数据采集, 构建出高精度地图, 但该方法定位准确度较低.Huang等[77 ] 采用相机信息并通过帧间匹配对点云之间的数据关联进行约束, 通过迭代最近点法提高了运动轨迹估计的准确性, 但所构建的地图精度较低.Ding等[78 ] 采用混合光束法提高地图构建的精度, 但该方法计算负荷较大, 严重制约系统运行的效率.Zhang等[79 ] 结合激光雷达、摄像头与惯导, 提出一种耦合的SLAM方案, 经过实地验证, 该方案的位姿估计与地图精度较高, 实现了高精度的里程计.肖军浩等[80 ] 创新性地提出相机-激光雷达外参标定方法与遮挡识别算法, 基于重投影与光度的图像特征与三维点云数据, 构建基于特征点的混合残差位姿优化系统, 该方法避免了初始值问题, 同时标定与建图精度得到提高. ...
1
... 作为SLAM技术中两大核心传感器, 激光雷达与相机的融合使用逐渐成为当前研究的热点及难点问题.目前已有专家学者将相机数据与激光雷达数据进行融合[71 -74 ] .文献[75 ]提出一种基于直接法的SLAM系统, 通过基于滑动窗口的跟踪方法将单目相机与激光雷达数据结合, 集成深度信息后通过帧间匹配, 提高运动估计精度保障实时性能.Chen等[76 ] 将2D激光雷达垂直安装在机器人上并配以深度相机进行数据采集, 构建出高精度地图, 但该方法定位准确度较低.Huang等[77 ] 采用相机信息并通过帧间匹配对点云之间的数据关联进行约束, 通过迭代最近点法提高了运动轨迹估计的准确性, 但所构建的地图精度较低.Ding等[78 ] 采用混合光束法提高地图构建的精度, 但该方法计算负荷较大, 严重制约系统运行的效率.Zhang等[79 ] 结合激光雷达、摄像头与惯导, 提出一种耦合的SLAM方案, 经过实地验证, 该方案的位姿估计与地图精度较高, 实现了高精度的里程计.肖军浩等[80 ] 创新性地提出相机-激光雷达外参标定方法与遮挡识别算法, 基于重投影与光度的图像特征与三维点云数据, 构建基于特征点的混合残差位姿优化系统, 该方法避免了初始值问题, 同时标定与建图精度得到提高. ...
1
... 作为SLAM技术中两大核心传感器, 激光雷达与相机的融合使用逐渐成为当前研究的热点及难点问题.目前已有专家学者将相机数据与激光雷达数据进行融合[71 -74 ] .文献[75 ]提出一种基于直接法的SLAM系统, 通过基于滑动窗口的跟踪方法将单目相机与激光雷达数据结合, 集成深度信息后通过帧间匹配, 提高运动估计精度保障实时性能.Chen等[76 ] 将2D激光雷达垂直安装在机器人上并配以深度相机进行数据采集, 构建出高精度地图, 但该方法定位准确度较低.Huang等[77 ] 采用相机信息并通过帧间匹配对点云之间的数据关联进行约束, 通过迭代最近点法提高了运动轨迹估计的准确性, 但所构建的地图精度较低.Ding等[78 ] 采用混合光束法提高地图构建的精度, 但该方法计算负荷较大, 严重制约系统运行的效率.Zhang等[79 ] 结合激光雷达、摄像头与惯导, 提出一种耦合的SLAM方案, 经过实地验证, 该方案的位姿估计与地图精度较高, 实现了高精度的里程计.肖军浩等[80 ] 创新性地提出相机-激光雷达外参标定方法与遮挡识别算法, 基于重投影与光度的图像特征与三维点云数据, 构建基于特征点的混合残差位姿优化系统, 该方法避免了初始值问题, 同时标定与建图精度得到提高. ...
Laser-visual-inertial odometry and mapping with high robustness and low drift
1
2018
... 作为SLAM技术中两大核心传感器, 激光雷达与相机的融合使用逐渐成为当前研究的热点及难点问题.目前已有专家学者将相机数据与激光雷达数据进行融合[71 -74 ] .文献[75 ]提出一种基于直接法的SLAM系统, 通过基于滑动窗口的跟踪方法将单目相机与激光雷达数据结合, 集成深度信息后通过帧间匹配, 提高运动估计精度保障实时性能.Chen等[76 ] 将2D激光雷达垂直安装在机器人上并配以深度相机进行数据采集, 构建出高精度地图, 但该方法定位准确度较低.Huang等[77 ] 采用相机信息并通过帧间匹配对点云之间的数据关联进行约束, 通过迭代最近点法提高了运动轨迹估计的准确性, 但所构建的地图精度较低.Ding等[78 ] 采用混合光束法提高地图构建的精度, 但该方法计算负荷较大, 严重制约系统运行的效率.Zhang等[79 ] 结合激光雷达、摄像头与惯导, 提出一种耦合的SLAM方案, 经过实地验证, 该方案的位姿估计与地图精度较高, 实现了高精度的里程计.肖军浩等[80 ] 创新性地提出相机-激光雷达外参标定方法与遮挡识别算法, 基于重投影与光度的图像特征与三维点云数据, 构建基于特征点的混合残差位姿优化系统, 该方法避免了初始值问题, 同时标定与建图精度得到提高. ...
单目相机-3维激光雷达的外参标定及融合里程计研究
1
2021
... 作为SLAM技术中两大核心传感器, 激光雷达与相机的融合使用逐渐成为当前研究的热点及难点问题.目前已有专家学者将相机数据与激光雷达数据进行融合[71 -74 ] .文献[75 ]提出一种基于直接法的SLAM系统, 通过基于滑动窗口的跟踪方法将单目相机与激光雷达数据结合, 集成深度信息后通过帧间匹配, 提高运动估计精度保障实时性能.Chen等[76 ] 将2D激光雷达垂直安装在机器人上并配以深度相机进行数据采集, 构建出高精度地图, 但该方法定位准确度较低.Huang等[77 ] 采用相机信息并通过帧间匹配对点云之间的数据关联进行约束, 通过迭代最近点法提高了运动轨迹估计的准确性, 但所构建的地图精度较低.Ding等[78 ] 采用混合光束法提高地图构建的精度, 但该方法计算负荷较大, 严重制约系统运行的效率.Zhang等[79 ] 结合激光雷达、摄像头与惯导, 提出一种耦合的SLAM方案, 经过实地验证, 该方案的位姿估计与地图精度较高, 实现了高精度的里程计.肖军浩等[80 ] 创新性地提出相机-激光雷达外参标定方法与遮挡识别算法, 基于重投影与光度的图像特征与三维点云数据, 构建基于特征点的混合残差位姿优化系统, 该方法避免了初始值问题, 同时标定与建图精度得到提高. ...
单目相机-3维激光雷达的外参标定及融合里程计研究
1
2021
... 作为SLAM技术中两大核心传感器, 激光雷达与相机的融合使用逐渐成为当前研究的热点及难点问题.目前已有专家学者将相机数据与激光雷达数据进行融合[71 -74 ] .文献[75 ]提出一种基于直接法的SLAM系统, 通过基于滑动窗口的跟踪方法将单目相机与激光雷达数据结合, 集成深度信息后通过帧间匹配, 提高运动估计精度保障实时性能.Chen等[76 ] 将2D激光雷达垂直安装在机器人上并配以深度相机进行数据采集, 构建出高精度地图, 但该方法定位准确度较低.Huang等[77 ] 采用相机信息并通过帧间匹配对点云之间的数据关联进行约束, 通过迭代最近点法提高了运动轨迹估计的准确性, 但所构建的地图精度较低.Ding等[78 ] 采用混合光束法提高地图构建的精度, 但该方法计算负荷较大, 严重制约系统运行的效率.Zhang等[79 ] 结合激光雷达、摄像头与惯导, 提出一种耦合的SLAM方案, 经过实地验证, 该方案的位姿估计与地图精度较高, 实现了高精度的里程计.肖军浩等[80 ] 创新性地提出相机-激光雷达外参标定方法与遮挡识别算法, 基于重投影与光度的图像特征与三维点云数据, 构建基于特征点的混合残差位姿优化系统, 该方法避免了初始值问题, 同时标定与建图精度得到提高. ...
基于EKF算法的太阳能无人机低成本飞控状态估计
1
2020
... 除了常见的激光雷达、相机与IMU之间的相互融合, 在一些特殊领域还需要与其他类型传感器进行融合使用, 比如毫米波雷达、地磁传感器、GPS等.郭安等[81 ] 利用气压计、GPS、空速计与IMU并基于卡尔曼滤波器, 依靠三级串联对无人机姿态、速度等信息进行状态估计.罗荣华等[82 ] 采用相机与声纳融合的方式进行SLAM技术的研究.崔巍杰[83 ] 基于松耦合方法, 通过融合激光雷达栅格地图的定位信息与毫米波雷达点云信息, 实现机器人自主定位与导航.王泽华等[84 ] 提出一种基于单目相机、IMU与磁力传感器融合的SLAM系统, 创造性地开发了一套模糊自适应的九轴姿态融合算法, 实现了基于磁力传感器与IMU的航向角估计, 解决了相机运动时数据感知精度较低的问题.Hertzberg等[85 ] 基于无迹卡尔曼滤波并结合IMU与GPS感知信号, 实现了高精度SLAM算法.Ko等[86 ] 通过融合气压计、GPS以及姿态航向测量系统感知数据, 并结合不变扩展卡尔曼滤波器, 实现了高精度无人机速度、高度、位姿等估计, 该多传感器融合系统的精度较传统EKF算法有所提高. ...
基于EKF算法的太阳能无人机低成本飞控状态估计
1
2020
... 除了常见的激光雷达、相机与IMU之间的相互融合, 在一些特殊领域还需要与其他类型传感器进行融合使用, 比如毫米波雷达、地磁传感器、GPS等.郭安等[81 ] 利用气压计、GPS、空速计与IMU并基于卡尔曼滤波器, 依靠三级串联对无人机姿态、速度等信息进行状态估计.罗荣华等[82 ] 采用相机与声纳融合的方式进行SLAM技术的研究.崔巍杰[83 ] 基于松耦合方法, 通过融合激光雷达栅格地图的定位信息与毫米波雷达点云信息, 实现机器人自主定位与导航.王泽华等[84 ] 提出一种基于单目相机、IMU与磁力传感器融合的SLAM系统, 创造性地开发了一套模糊自适应的九轴姿态融合算法, 实现了基于磁力传感器与IMU的航向角估计, 解决了相机运动时数据感知精度较低的问题.Hertzberg等[85 ] 基于无迹卡尔曼滤波并结合IMU与GPS感知信号, 实现了高精度SLAM算法.Ko等[86 ] 通过融合气压计、GPS以及姿态航向测量系统感知数据, 并结合不变扩展卡尔曼滤波器, 实现了高精度无人机速度、高度、位姿等估计, 该多传感器融合系统的精度较传统EKF算法有所提高. ...
基于信息融合的同时定位与地图创建研究
1
2004
... 除了常见的激光雷达、相机与IMU之间的相互融合, 在一些特殊领域还需要与其他类型传感器进行融合使用, 比如毫米波雷达、地磁传感器、GPS等.郭安等[81 ] 利用气压计、GPS、空速计与IMU并基于卡尔曼滤波器, 依靠三级串联对无人机姿态、速度等信息进行状态估计.罗荣华等[82 ] 采用相机与声纳融合的方式进行SLAM技术的研究.崔巍杰[83 ] 基于松耦合方法, 通过融合激光雷达栅格地图的定位信息与毫米波雷达点云信息, 实现机器人自主定位与导航.王泽华等[84 ] 提出一种基于单目相机、IMU与磁力传感器融合的SLAM系统, 创造性地开发了一套模糊自适应的九轴姿态融合算法, 实现了基于磁力传感器与IMU的航向角估计, 解决了相机运动时数据感知精度较低的问题.Hertzberg等[85 ] 基于无迹卡尔曼滤波并结合IMU与GPS感知信号, 实现了高精度SLAM算法.Ko等[86 ] 通过融合气压计、GPS以及姿态航向测量系统感知数据, 并结合不变扩展卡尔曼滤波器, 实现了高精度无人机速度、高度、位姿等估计, 该多传感器融合系统的精度较传统EKF算法有所提高. ...
基于信息融合的同时定位与地图创建研究
1
2004
... 除了常见的激光雷达、相机与IMU之间的相互融合, 在一些特殊领域还需要与其他类型传感器进行融合使用, 比如毫米波雷达、地磁传感器、GPS等.郭安等[81 ] 利用气压计、GPS、空速计与IMU并基于卡尔曼滤波器, 依靠三级串联对无人机姿态、速度等信息进行状态估计.罗荣华等[82 ] 采用相机与声纳融合的方式进行SLAM技术的研究.崔巍杰[83 ] 基于松耦合方法, 通过融合激光雷达栅格地图的定位信息与毫米波雷达点云信息, 实现机器人自主定位与导航.王泽华等[84 ] 提出一种基于单目相机、IMU与磁力传感器融合的SLAM系统, 创造性地开发了一套模糊自适应的九轴姿态融合算法, 实现了基于磁力传感器与IMU的航向角估计, 解决了相机运动时数据感知精度较低的问题.Hertzberg等[85 ] 基于无迹卡尔曼滤波并结合IMU与GPS感知信号, 实现了高精度SLAM算法.Ko等[86 ] 通过融合气压计、GPS以及姿态航向测量系统感知数据, 并结合不变扩展卡尔曼滤波器, 实现了高精度无人机速度、高度、位姿等估计, 该多传感器融合系统的精度较传统EKF算法有所提高. ...
1
... 除了常见的激光雷达、相机与IMU之间的相互融合, 在一些特殊领域还需要与其他类型传感器进行融合使用, 比如毫米波雷达、地磁传感器、GPS等.郭安等[81 ] 利用气压计、GPS、空速计与IMU并基于卡尔曼滤波器, 依靠三级串联对无人机姿态、速度等信息进行状态估计.罗荣华等[82 ] 采用相机与声纳融合的方式进行SLAM技术的研究.崔巍杰[83 ] 基于松耦合方法, 通过融合激光雷达栅格地图的定位信息与毫米波雷达点云信息, 实现机器人自主定位与导航.王泽华等[84 ] 提出一种基于单目相机、IMU与磁力传感器融合的SLAM系统, 创造性地开发了一套模糊自适应的九轴姿态融合算法, 实现了基于磁力传感器与IMU的航向角估计, 解决了相机运动时数据感知精度较低的问题.Hertzberg等[85 ] 基于无迹卡尔曼滤波并结合IMU与GPS感知信号, 实现了高精度SLAM算法.Ko等[86 ] 通过融合气压计、GPS以及姿态航向测量系统感知数据, 并结合不变扩展卡尔曼滤波器, 实现了高精度无人机速度、高度、位姿等估计, 该多传感器融合系统的精度较传统EKF算法有所提高. ...
1
... 除了常见的激光雷达、相机与IMU之间的相互融合, 在一些特殊领域还需要与其他类型传感器进行融合使用, 比如毫米波雷达、地磁传感器、GPS等.郭安等[81 ] 利用气压计、GPS、空速计与IMU并基于卡尔曼滤波器, 依靠三级串联对无人机姿态、速度等信息进行状态估计.罗荣华等[82 ] 采用相机与声纳融合的方式进行SLAM技术的研究.崔巍杰[83 ] 基于松耦合方法, 通过融合激光雷达栅格地图的定位信息与毫米波雷达点云信息, 实现机器人自主定位与导航.王泽华等[84 ] 提出一种基于单目相机、IMU与磁力传感器融合的SLAM系统, 创造性地开发了一套模糊自适应的九轴姿态融合算法, 实现了基于磁力传感器与IMU的航向角估计, 解决了相机运动时数据感知精度较低的问题.Hertzberg等[85 ] 基于无迹卡尔曼滤波并结合IMU与GPS感知信号, 实现了高精度SLAM算法.Ko等[86 ] 通过融合气压计、GPS以及姿态航向测量系统感知数据, 并结合不变扩展卡尔曼滤波器, 实现了高精度无人机速度、高度、位姿等估计, 该多传感器融合系统的精度较传统EKF算法有所提高. ...
基于惯性/磁力传感器与单目视觉融合的slam方法
1
2018
... 除了常见的激光雷达、相机与IMU之间的相互融合, 在一些特殊领域还需要与其他类型传感器进行融合使用, 比如毫米波雷达、地磁传感器、GPS等.郭安等[81 ] 利用气压计、GPS、空速计与IMU并基于卡尔曼滤波器, 依靠三级串联对无人机姿态、速度等信息进行状态估计.罗荣华等[82 ] 采用相机与声纳融合的方式进行SLAM技术的研究.崔巍杰[83 ] 基于松耦合方法, 通过融合激光雷达栅格地图的定位信息与毫米波雷达点云信息, 实现机器人自主定位与导航.王泽华等[84 ] 提出一种基于单目相机、IMU与磁力传感器融合的SLAM系统, 创造性地开发了一套模糊自适应的九轴姿态融合算法, 实现了基于磁力传感器与IMU的航向角估计, 解决了相机运动时数据感知精度较低的问题.Hertzberg等[85 ] 基于无迹卡尔曼滤波并结合IMU与GPS感知信号, 实现了高精度SLAM算法.Ko等[86 ] 通过融合气压计、GPS以及姿态航向测量系统感知数据, 并结合不变扩展卡尔曼滤波器, 实现了高精度无人机速度、高度、位姿等估计, 该多传感器融合系统的精度较传统EKF算法有所提高. ...
基于惯性/磁力传感器与单目视觉融合的slam方法
1
2018
... 除了常见的激光雷达、相机与IMU之间的相互融合, 在一些特殊领域还需要与其他类型传感器进行融合使用, 比如毫米波雷达、地磁传感器、GPS等.郭安等[81 ] 利用气压计、GPS、空速计与IMU并基于卡尔曼滤波器, 依靠三级串联对无人机姿态、速度等信息进行状态估计.罗荣华等[82 ] 采用相机与声纳融合的方式进行SLAM技术的研究.崔巍杰[83 ] 基于松耦合方法, 通过融合激光雷达栅格地图的定位信息与毫米波雷达点云信息, 实现机器人自主定位与导航.王泽华等[84 ] 提出一种基于单目相机、IMU与磁力传感器融合的SLAM系统, 创造性地开发了一套模糊自适应的九轴姿态融合算法, 实现了基于磁力传感器与IMU的航向角估计, 解决了相机运动时数据感知精度较低的问题.Hertzberg等[85 ] 基于无迹卡尔曼滤波并结合IMU与GPS感知信号, 实现了高精度SLAM算法.Ko等[86 ] 通过融合气压计、GPS以及姿态航向测量系统感知数据, 并结合不变扩展卡尔曼滤波器, 实现了高精度无人机速度、高度、位姿等估计, 该多传感器融合系统的精度较传统EKF算法有所提高. ...
Integrating generic sensor fusion algorithms with sound state representations through encapsulation of manifolds
1
2011
... 除了常见的激光雷达、相机与IMU之间的相互融合, 在一些特殊领域还需要与其他类型传感器进行融合使用, 比如毫米波雷达、地磁传感器、GPS等.郭安等[81 ] 利用气压计、GPS、空速计与IMU并基于卡尔曼滤波器, 依靠三级串联对无人机姿态、速度等信息进行状态估计.罗荣华等[82 ] 采用相机与声纳融合的方式进行SLAM技术的研究.崔巍杰[83 ] 基于松耦合方法, 通过融合激光雷达栅格地图的定位信息与毫米波雷达点云信息, 实现机器人自主定位与导航.王泽华等[84 ] 提出一种基于单目相机、IMU与磁力传感器融合的SLAM系统, 创造性地开发了一套模糊自适应的九轴姿态融合算法, 实现了基于磁力传感器与IMU的航向角估计, 解决了相机运动时数据感知精度较低的问题.Hertzberg等[85 ] 基于无迹卡尔曼滤波并结合IMU与GPS感知信号, 实现了高精度SLAM算法.Ko等[86 ] 通过融合气压计、GPS以及姿态航向测量系统感知数据, 并结合不变扩展卡尔曼滤波器, 实现了高精度无人机速度、高度、位姿等估计, 该多传感器融合系统的精度较传统EKF算法有所提高. ...
Features of invariant extended Kalman filter applied to unmanned aerial vehicle navigation
1
2018
... 除了常见的激光雷达、相机与IMU之间的相互融合, 在一些特殊领域还需要与其他类型传感器进行融合使用, 比如毫米波雷达、地磁传感器、GPS等.郭安等[81 ] 利用气压计、GPS、空速计与IMU并基于卡尔曼滤波器, 依靠三级串联对无人机姿态、速度等信息进行状态估计.罗荣华等[82 ] 采用相机与声纳融合的方式进行SLAM技术的研究.崔巍杰[83 ] 基于松耦合方法, 通过融合激光雷达栅格地图的定位信息与毫米波雷达点云信息, 实现机器人自主定位与导航.王泽华等[84 ] 提出一种基于单目相机、IMU与磁力传感器融合的SLAM系统, 创造性地开发了一套模糊自适应的九轴姿态融合算法, 实现了基于磁力传感器与IMU的航向角估计, 解决了相机运动时数据感知精度较低的问题.Hertzberg等[85 ] 基于无迹卡尔曼滤波并结合IMU与GPS感知信号, 实现了高精度SLAM算法.Ko等[86 ] 通过融合气压计、GPS以及姿态航向测量系统感知数据, 并结合不变扩展卡尔曼滤波器, 实现了高精度无人机速度、高度、位姿等估计, 该多传感器融合系统的精度较传统EKF算法有所提高. ...
1
... 在陌生环境中智能车需要通过自身携带的传感器对周边环境进行感知并依靠感知数据建立环境模型, 环境模型是智能车进行自定位与自主导航的关键基础[87 ] .陌生环境是指智能车对所处环境不具备任何先验信息, 如障碍物位置形状、环境总体布局等信息[88 ] . ...
1
... 在陌生环境中智能车需要通过自身携带的传感器对周边环境进行感知并依靠感知数据建立环境模型, 环境模型是智能车进行自定位与自主导航的关键基础[87 ] .陌生环境是指智能车对所处环境不具备任何先验信息, 如障碍物位置形状、环境总体布局等信息[88 ] . ...
移动机器人SLAM关键问题和解决方法综述
2
2018
... 在陌生环境中智能车需要通过自身携带的传感器对周边环境进行感知并依靠感知数据建立环境模型, 环境模型是智能车进行自定位与自主导航的关键基础[87 ] .陌生环境是指智能车对所处环境不具备任何先验信息, 如障碍物位置形状、环境总体布局等信息[88 ] . ...
... 不同传感器存在数据类型、坐标表达方式、时间戳类型不同等特点, 需要对感知数据统一处理.数据关联由数据融合技术兴起, 在SLAM技术中用于对比已有环境地图特征与不同时间的感测数据特征的对应关系[89 ] .数据关联的核心思想是提取传感器在不同位置与时间下测得的2个环境信息的关键特征, 通过算法检验与关键特征匹配结果, 判断其同属为一个物体的可能性大小, 即关键特征提取-特征匹配-地图匹配[88 ] . ...
移动机器人SLAM关键问题和解决方法综述
2
2018
... 在陌生环境中智能车需要通过自身携带的传感器对周边环境进行感知并依靠感知数据建立环境模型, 环境模型是智能车进行自定位与自主导航的关键基础[87 ] .陌生环境是指智能车对所处环境不具备任何先验信息, 如障碍物位置形状、环境总体布局等信息[88 ] . ...
... 不同传感器存在数据类型、坐标表达方式、时间戳类型不同等特点, 需要对感知数据统一处理.数据关联由数据融合技术兴起, 在SLAM技术中用于对比已有环境地图特征与不同时间的感测数据特征的对应关系[89 ] .数据关联的核心思想是提取传感器在不同位置与时间下测得的2个环境信息的关键特征, 通过算法检验与关键特征匹配结果, 判断其同属为一个物体的可能性大小, 即关键特征提取-特征匹配-地图匹配[88 ] . ...
SLAM问题中的数据关联方法研究
2
2019
... 不确定性信息是智能车创建地图过程中对目标的模糊识别, 主要包括2种类型: (1)由于智能车携带的传感器自身性能限制, 比如激光雷达规定有效检测范围, 超出有效检测范围的点很有可能在扫描过程中产生误差; (2)环境本身存在各种不确定因素, 比如路面不平整或形状较为复杂的物体, 这种情况不利于进行特征提取, 容易产生测量误差[89 ] .不确定性信息的存在将严重影响地图创建的精确度, 从而影响智能车定位与导航的效果. ...
... 不同传感器存在数据类型、坐标表达方式、时间戳类型不同等特点, 需要对感知数据统一处理.数据关联由数据融合技术兴起, 在SLAM技术中用于对比已有环境地图特征与不同时间的感测数据特征的对应关系[89 ] .数据关联的核心思想是提取传感器在不同位置与时间下测得的2个环境信息的关键特征, 通过算法检验与关键特征匹配结果, 判断其同属为一个物体的可能性大小, 即关键特征提取-特征匹配-地图匹配[88 ] . ...
SLAM问题中的数据关联方法研究
2
2019
... 不确定性信息是智能车创建地图过程中对目标的模糊识别, 主要包括2种类型: (1)由于智能车携带的传感器自身性能限制, 比如激光雷达规定有效检测范围, 超出有效检测范围的点很有可能在扫描过程中产生误差; (2)环境本身存在各种不确定因素, 比如路面不平整或形状较为复杂的物体, 这种情况不利于进行特征提取, 容易产生测量误差[89 ] .不确定性信息的存在将严重影响地图创建的精确度, 从而影响智能车定位与导航的效果. ...
... 不同传感器存在数据类型、坐标表达方式、时间戳类型不同等特点, 需要对感知数据统一处理.数据关联由数据融合技术兴起, 在SLAM技术中用于对比已有环境地图特征与不同时间的感测数据特征的对应关系[89 ] .数据关联的核心思想是提取传感器在不同位置与时间下测得的2个环境信息的关键特征, 通过算法检验与关键特征匹配结果, 判断其同属为一个物体的可能性大小, 即关键特征提取-特征匹配-地图匹配[88 ] . ...
The probabilistic data association filter
1
2010
... 目前数据关联在多传感器融合与目标跟踪方面的应用较多, 且相关算法较为成熟[90 -91 ] .由于环境信息数据库较大, 该方法应用于SLAM技术时会产生大量复杂计算, 严重影响系统运行效率.当智能车自定位过程出现累积误差时, 数据关联的应用难度会随之增大. ...
1
... 目前数据关联在多传感器融合与目标跟踪方面的应用较多, 且相关算法较为成熟[90 -91 ] .由于环境信息数据库较大, 该方法应用于SLAM技术时会产生大量复杂计算, 严重影响系统运行效率.当智能车自定位过程出现累积误差时, 数据关联的应用难度会随之增大. ...
移动机器人里程计系统误差的校正方法
1
2014
... 累积误差主要源自3个方面: 里程计误差、观测误差以及数据关联误差引起的误差[92 ] . ...
移动机器人里程计系统误差的校正方法
1
2014
... 累积误差主要源自3个方面: 里程计误差、观测误差以及数据关联误差引起的误差[92 ] . ...
基于深度学习的视觉SLAM回环检测方法
1
2020
... SLAM技术在实践过程中暴露出许多难题及不足, 为更好地解决其在实际工程中的应用, 并考虑到深度学习具备学习能力强、使用领域覆盖范围广、适应性强以及可移植性好等优点, 目前有不少研究者尝试将深度学习融入SLAM技术, 对已有的SLAM技术框架进行重构优化.将深度学习与SLAM结合已逐渐成为各领域竞相研究的热点[93 -96 ] .现阶段将深度学习融入定位与建图技术的方法有三个: (1)利用深度学习代替SLAM环节中的一环或几环; (2)在定位与建图过程中加入语义信息; (3)端到端的SLAM技术. ...
基于深度学习的视觉SLAM回环检测方法
1
2020
... SLAM技术在实践过程中暴露出许多难题及不足, 为更好地解决其在实际工程中的应用, 并考虑到深度学习具备学习能力强、使用领域覆盖范围广、适应性强以及可移植性好等优点, 目前有不少研究者尝试将深度学习融入SLAM技术, 对已有的SLAM技术框架进行重构优化.将深度学习与SLAM结合已逐渐成为各领域竞相研究的热点[93 -96 ] .现阶段将深度学习融入定位与建图技术的方法有三个: (1)利用深度学习代替SLAM环节中的一环或几环; (2)在定位与建图过程中加入语义信息; (3)端到端的SLAM技术. ...
深度学习下的视觉SLAM回环检测及其算法
0
2021
深度学习下的视觉SLAM回环检测及其算法
0
2021
基于深度学习的视觉SLAM系统
1
2019
... SLAM技术在实践过程中暴露出许多难题及不足, 为更好地解决其在实际工程中的应用, 并考虑到深度学习具备学习能力强、使用领域覆盖范围广、适应性强以及可移植性好等优点, 目前有不少研究者尝试将深度学习融入SLAM技术, 对已有的SLAM技术框架进行重构优化.将深度学习与SLAM结合已逐渐成为各领域竞相研究的热点[93 -96 ] .现阶段将深度学习融入定位与建图技术的方法有三个: (1)利用深度学习代替SLAM环节中的一环或几环; (2)在定位与建图过程中加入语义信息; (3)端到端的SLAM技术. ...
基于深度学习的视觉SLAM系统
1
2019
... SLAM技术在实践过程中暴露出许多难题及不足, 为更好地解决其在实际工程中的应用, 并考虑到深度学习具备学习能力强、使用领域覆盖范围广、适应性强以及可移植性好等优点, 目前有不少研究者尝试将深度学习融入SLAM技术, 对已有的SLAM技术框架进行重构优化.将深度学习与SLAM结合已逐渐成为各领域竞相研究的热点[93 -96 ] .现阶段将深度学习融入定位与建图技术的方法有三个: (1)利用深度学习代替SLAM环节中的一环或几环; (2)在定位与建图过程中加入语义信息; (3)端到端的SLAM技术. ...
Deep SLAM: a robust monocular SLAM system with unsupervised deeplearning
1
2021
... 深度学习取代传统定位与建图技术中的部分环节时, 往往从特征点、深度估计、位姿估计、重定位等方面出发.Li等[97 ] 提出了一套基于无监督深度学习的鲁棒单目SLAM系统, 该系统不需要标注地面真实姿态, 通过立体图像实现完全无人监督, 能够同时生成姿态估计以及深度图像, 该方法在姿态估计精度方面表现良好.Li等[98 ] 基于多任务特征提取网络和自监督特征点, 提出了一种深度学习实时视觉SLAM方法, 通过设计一种简易的卷积神经网络对特征点进行探测, 使用描述符代替传统的特征提取方式, 该方法在精度和效率两方面均表现良好.Memon等[99 ] 基于有监督和无监督深度神经网络, 提出一种单目SLAM闭环检测方法, 该方法不需要生成词汇表, 信息存储效率更高, 同时采用两种深度神经网络进行闭环检测, 能够避免移动物体对闭环检测准确性的影响. ...
A deep-learning real-time visual SLAM system based on multi-task featureextraction network and self-supervised feature points
1
2021
... 深度学习取代传统定位与建图技术中的部分环节时, 往往从特征点、深度估计、位姿估计、重定位等方面出发.Li等[97 ] 提出了一套基于无监督深度学习的鲁棒单目SLAM系统, 该系统不需要标注地面真实姿态, 通过立体图像实现完全无人监督, 能够同时生成姿态估计以及深度图像, 该方法在姿态估计精度方面表现良好.Li等[98 ] 基于多任务特征提取网络和自监督特征点, 提出了一种深度学习实时视觉SLAM方法, 通过设计一种简易的卷积神经网络对特征点进行探测, 使用描述符代替传统的特征提取方式, 该方法在精度和效率两方面均表现良好.Memon等[99 ] 基于有监督和无监督深度神经网络, 提出一种单目SLAM闭环检测方法, 该方法不需要生成词汇表, 信息存储效率更高, 同时采用两种深度神经网络进行闭环检测, 能够避免移动物体对闭环检测准确性的影响. ...
Loop closure detection using supervised and unsupervised deepneural networks for monocular SLAM systems
1
2020
... 深度学习取代传统定位与建图技术中的部分环节时, 往往从特征点、深度估计、位姿估计、重定位等方面出发.Li等[97 ] 提出了一套基于无监督深度学习的鲁棒单目SLAM系统, 该系统不需要标注地面真实姿态, 通过立体图像实现完全无人监督, 能够同时生成姿态估计以及深度图像, 该方法在姿态估计精度方面表现良好.Li等[98 ] 基于多任务特征提取网络和自监督特征点, 提出了一种深度学习实时视觉SLAM方法, 通过设计一种简易的卷积神经网络对特征点进行探测, 使用描述符代替传统的特征提取方式, 该方法在精度和效率两方面均表现良好.Memon等[99 ] 基于有监督和无监督深度神经网络, 提出一种单目SLAM闭环检测方法, 该方法不需要生成词汇表, 信息存储效率更高, 同时采用两种深度神经网络进行闭环检测, 能够避免移动物体对闭环检测准确性的影响. ...
Real-time visual-inertial localization using semanticsegmentation towards dynamic environments
1
2020
... 语义信息能够提高传统SLAM建图与道路信息识别的效率, 将语义信息添加到定位与建图技术, 可以进行图像语义分割以及语义地图构建.目前语义SLAM已经成为各专家学者研究的热点.Zhao等[100 ] 考虑到移动物体难以进行地图匹配的难题, 提出了一种针对室内动态环境的视觉语义SLAM, 通过Mask-RCNN算法对潜在移动物体进行探测, 利用光流法检测动态特征点, 基于二者对无用特征点进行剔除, 并将语义标签映射到点云数据, 最终得到场景的静态及语义信息.Mostafa等[101 ] 提出了一种基于图像语义信息与相机运动参数融合的三维位置和速度估计方法, 该方法以扩展卡尔曼滤波为基础, 在相机运动参数中的连续帧中提取融合语义信息与汽车模型, 估计同一场景不同车辆的3D位置与速度, 该方法的位置与速度估计误差较低. ...
Towards semantic SLAM: 3D position and velocity estimation by fusing image semantic information with camera motion parameters for traffic scene analysis
1
2021
... 语义信息能够提高传统SLAM建图与道路信息识别的效率, 将语义信息添加到定位与建图技术, 可以进行图像语义分割以及语义地图构建.目前语义SLAM已经成为各专家学者研究的热点.Zhao等[100 ] 考虑到移动物体难以进行地图匹配的难题, 提出了一种针对室内动态环境的视觉语义SLAM, 通过Mask-RCNN算法对潜在移动物体进行探测, 利用光流法检测动态特征点, 基于二者对无用特征点进行剔除, 并将语义标签映射到点云数据, 最终得到场景的静态及语义信息.Mostafa等[101 ] 提出了一种基于图像语义信息与相机运动参数融合的三维位置和速度估计方法, 该方法以扩展卡尔曼滤波为基础, 在相机运动参数中的连续帧中提取融合语义信息与汽车模型, 估计同一场景不同车辆的3D位置与速度, 该方法的位置与速度估计误差较低. ...
视觉SLAM的研究现状与展望
1
2020
... 基于已有传感器的SLAM技术的发展已较为成熟, 但各传感器性能的不同以及多传感器融合的难题导致SLAM技术在定位、制图与导航方面依旧存在很多目前难以解决的问题[102 ] .新型传感器的出现能够为SLAM技术的进一步发展不断注入新的活力, 当通过新型传感器获取的数据质量较高或者不需做太多处理时, SLAM系统的计算压力与运行效率均会得到改善.比如Event Camera以低功耗、高帧率等优点也开始在SLAM领域得到应用[103 -104 ] , 新型传感器的广泛使用将对SLAM的技术格局产生巨大影响. ...
视觉SLAM的研究现状与展望
1
2020
... 基于已有传感器的SLAM技术的发展已较为成熟, 但各传感器性能的不同以及多传感器融合的难题导致SLAM技术在定位、制图与导航方面依旧存在很多目前难以解决的问题[102 ] .新型传感器的出现能够为SLAM技术的进一步发展不断注入新的活力, 当通过新型传感器获取的数据质量较高或者不需做太多处理时, SLAM系统的计算压力与运行效率均会得到改善.比如Event Camera以低功耗、高帧率等优点也开始在SLAM领域得到应用[103 -104 ] , 新型传感器的广泛使用将对SLAM的技术格局产生巨大影响. ...
1
... 基于已有传感器的SLAM技术的发展已较为成熟, 但各传感器性能的不同以及多传感器融合的难题导致SLAM技术在定位、制图与导航方面依旧存在很多目前难以解决的问题[102 ] .新型传感器的出现能够为SLAM技术的进一步发展不断注入新的活力, 当通过新型传感器获取的数据质量较高或者不需做太多处理时, SLAM系统的计算压力与运行效率均会得到改善.比如Event Camera以低功耗、高帧率等优点也开始在SLAM领域得到应用[103 -104 ] , 新型传感器的广泛使用将对SLAM的技术格局产生巨大影响. ...
基于事件相机的定位与建图算法: 综述
1
2021
... 基于已有传感器的SLAM技术的发展已较为成熟, 但各传感器性能的不同以及多传感器融合的难题导致SLAM技术在定位、制图与导航方面依旧存在很多目前难以解决的问题[102 ] .新型传感器的出现能够为SLAM技术的进一步发展不断注入新的活力, 当通过新型传感器获取的数据质量较高或者不需做太多处理时, SLAM系统的计算压力与运行效率均会得到改善.比如Event Camera以低功耗、高帧率等优点也开始在SLAM领域得到应用[103 -104 ] , 新型传感器的广泛使用将对SLAM的技术格局产生巨大影响. ...
基于事件相机的定位与建图算法: 综述
1
2021
... 基于已有传感器的SLAM技术的发展已较为成熟, 但各传感器性能的不同以及多传感器融合的难题导致SLAM技术在定位、制图与导航方面依旧存在很多目前难以解决的问题[102 ] .新型传感器的出现能够为SLAM技术的进一步发展不断注入新的活力, 当通过新型传感器获取的数据质量较高或者不需做太多处理时, SLAM系统的计算压力与运行效率均会得到改善.比如Event Camera以低功耗、高帧率等优点也开始在SLAM领域得到应用[103 -104 ] , 新型传感器的广泛使用将对SLAM的技术格局产生巨大影响. ...
智慧公路关键技术发展综述
1
2020
... 总体而言, 尽管SLAM技术相关基础理论框架已经比较完善, 各传感器的融合使用也较为成熟.但考虑到实际工程需求, 为实现SLAM技术多领域、广覆盖的底层功能应用, SLAM技术仍需不断吸收新的理论方法与传感技术, 形成更为完善、稳定、可靠的系统框架, 为响应国家对智慧交通的号召, 更好地服务我国智慧交通发展提供更安全、更可靠的技术保障[105 ] . ...
智慧公路关键技术发展综述
1
2020
... 总体而言, 尽管SLAM技术相关基础理论框架已经比较完善, 各传感器的融合使用也较为成熟.但考虑到实际工程需求, 为实现SLAM技术多领域、广覆盖的底层功能应用, SLAM技术仍需不断吸收新的理论方法与传感技术, 形成更为完善、稳定、可靠的系统框架, 为响应国家对智慧交通的号召, 更好地服务我国智慧交通发展提供更安全、更可靠的技术保障[105 ] . ...






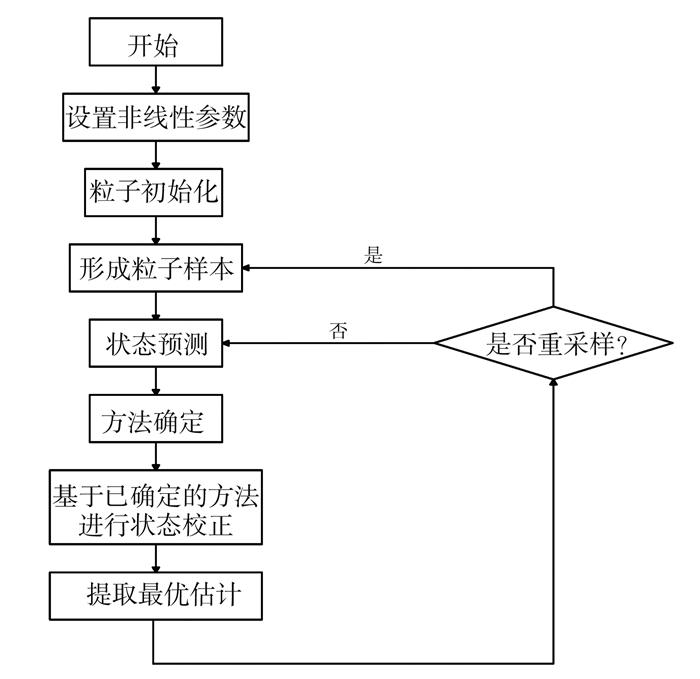
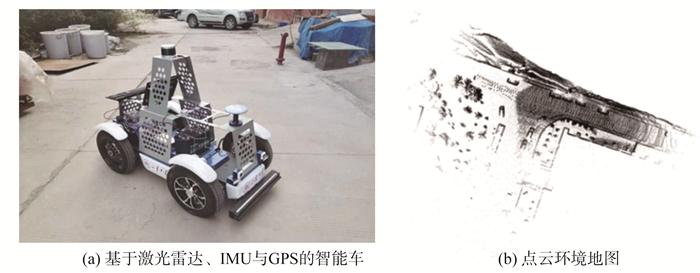

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}