山东大学学报 (工学版) ›› 2019, Vol. 49 ›› Issue (6): 73-80.doi: 10.6040/j.issn.1672-3961.0.2019.185
赵洪华1( ),赵建1,段星光2,胡志通1,田倩倩1,赵耀华1
),赵建1,段星光2,胡志通1,田倩倩1,赵耀华1
Honghua ZHAO1(),Jian ZHAO1,Xingguang DUAN2,Zhitong HU1,Qianqian TIAN1,Yaohua ZHAO1
摘要:
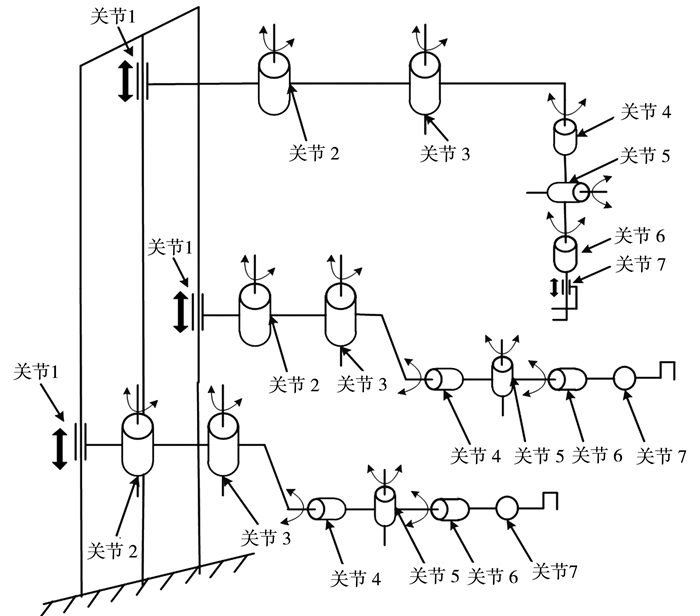
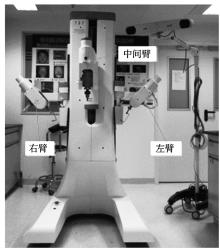
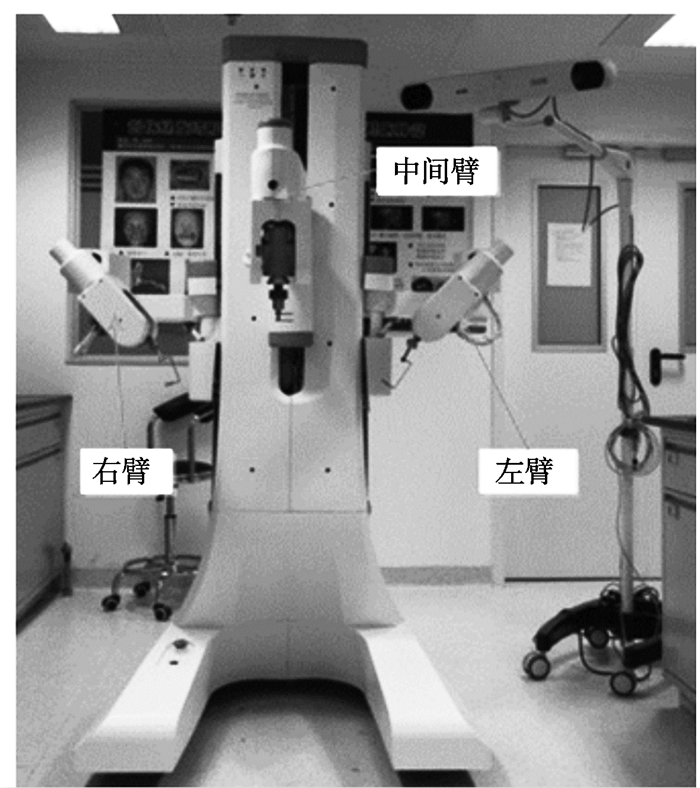
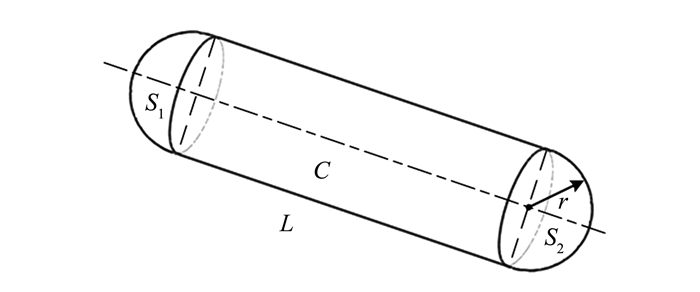
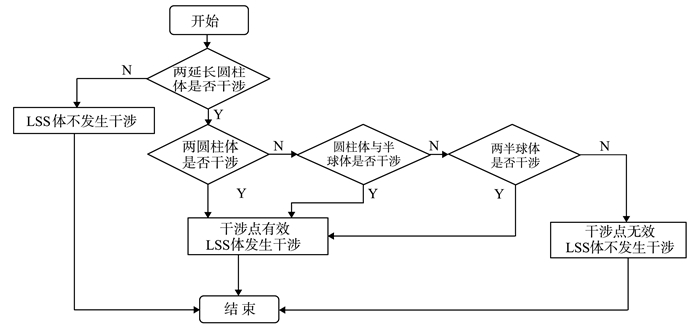
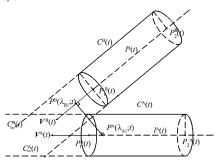
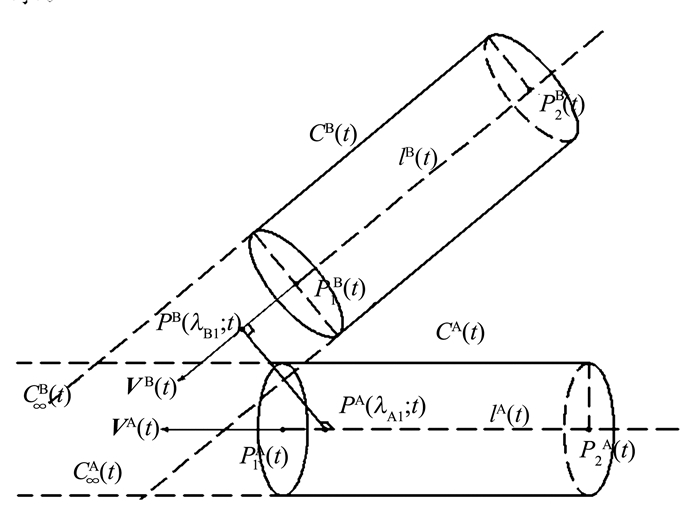
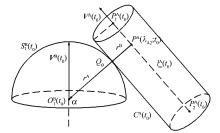
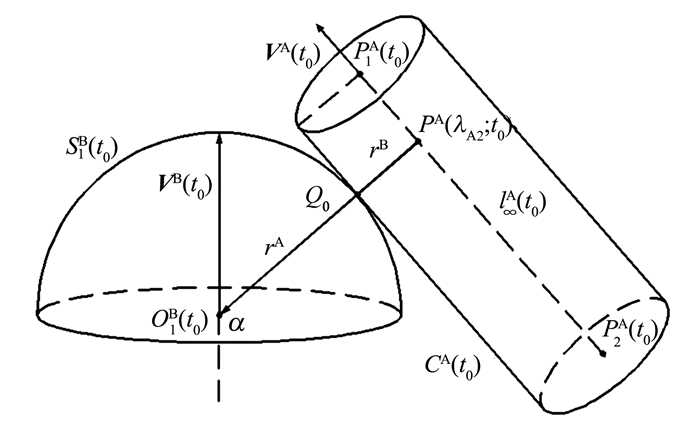
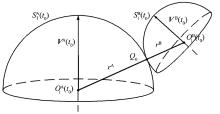
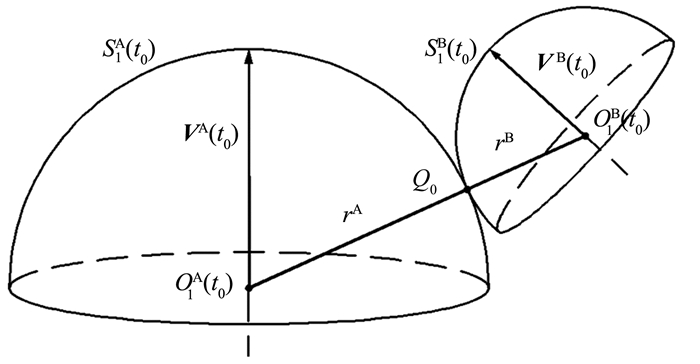
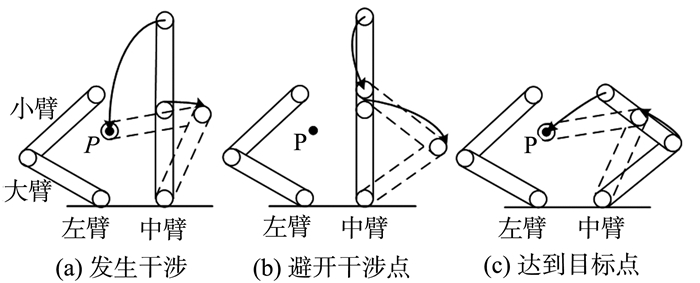
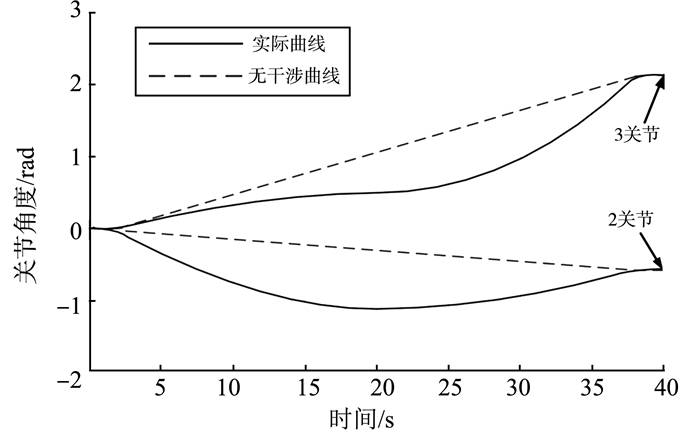
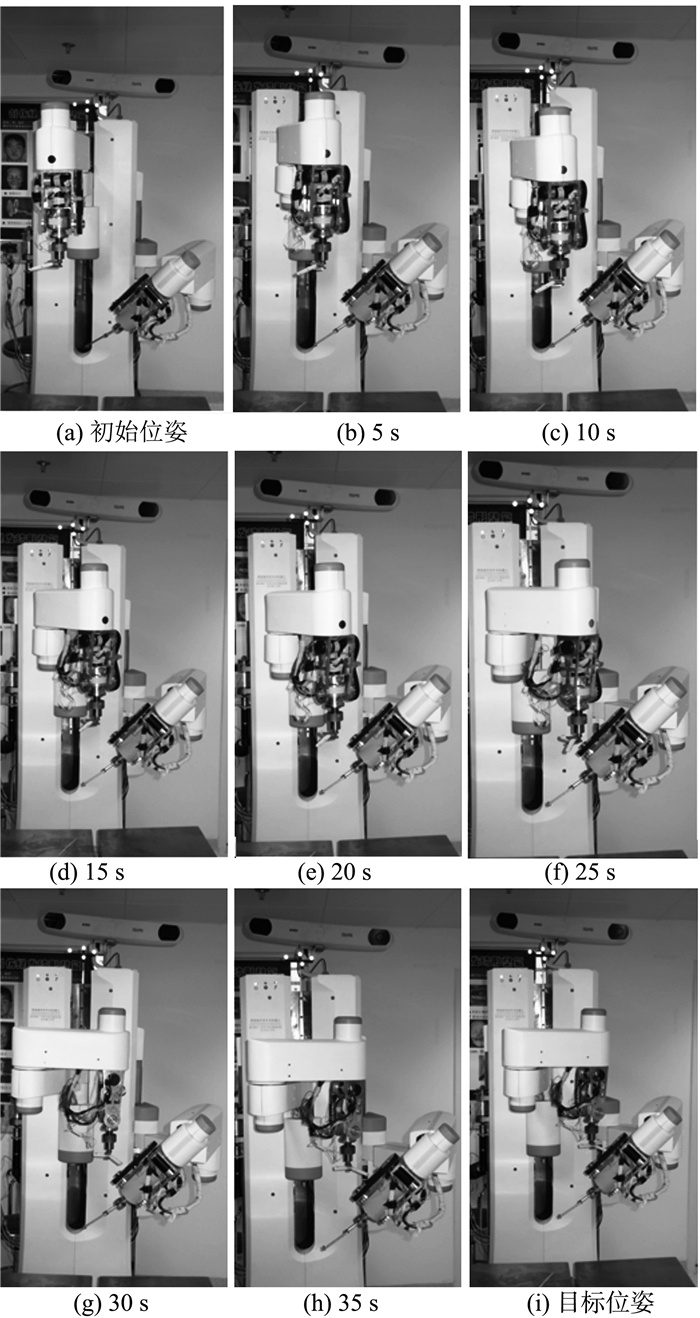
基于颌骨重建手术要求和手术机器人设计准则,提出主被动结合的7自由度3手臂构型方案。为了满足手术机器人机械臂干涉分析高效率的要求,采用线形扫描球(linearly swept sphere, LSS)单元体模型简化复杂结构的机械臂,构建两圆柱体之间、圆柱体与半球体之间以及两半球体之间的干涉数学模型,并提出有效干涉点的概念及干涉点有效性的判断方法,得到机械臂在任意位置下的干涉判断准则。基于机器人平台的无干涉控制试验验证了方法的正确性,与传统干涉分析方法相比,该方法简化了基本几何体模型干涉分析的判据和过程,减少了模型相互之间干涉判断的次数,进一步提高了干涉分析的效率。
中图分类号:
| 1 | 黄燕.自体骨、生物材料在颅颌面骨缺损修复中的应用研究[D].武汉:华中科技大学, 2014. |
| HUANG Yan.Autologous bone biological materials in the application of the craniofacial and maxillofacial bone defects repair[D]. Wuhan: Huazhong University of Science and Technology, 2014. | |
| 2 | 黄志录. 牙隐裂错颌畸形对人体及颌面部的影响[J]. 全科口腔医学电子杂志, 2015, 2 (3): 7- 8. |
| HUANG Zhilu . Effects of cleft teeth and malocclusion on human body and maxillofacial region[J]. General Journal of Stomatology, 2015, 2 (3): 7- 8. | |
| 3 | 王兴.正颌手术辅助机器人系统设计[D].济南:山东大学, 2016. |
| WANG Xing. System design for orthognathic aided robot[D]. Jinan: Shandong University, 2016. | |
| 4 | EGGERS G , KLEIN J , BLANK J , et al. Piezosurgery: an ultrasound device for cutting bone and its use and limitations in maxillofacial surgery[J]. British Journal of Oral & Maxillofacial Surgery, 2004, 42 (5): 451- 453. |
| 5 |
段星光, 郭传瑸, 陈超. 颅颌面外科辅助手术机器人系统[J]. 机器人技术与应用, 2011, (4): 38- 42.
doi: 10.3969/j.issn.1004-6437.2011.04.010 |
|
DUAN Xingguang , GUO Chuanbin , CHEN Chao . Robot system for craniomaxillofacial surgery[J]. Robot Technique and Application, 2011, (4): 38- 42.
doi: 10.3969/j.issn.1004-6437.2011.04.010 |
|
| 6 |
陈黎明, 栾楠, 张诗雷. 颅颌面骨畸形整复手术中辅助机器人的应用[J]. 机械与电子, 2010, (4): 57- 60.
doi: 10.3969/j.issn.1001-2257.2010.04.016 |
|
CHEN Liming , LUAN Nan , ZHANG Shilei . Research on the application of Multi DOF Robot on Orthognathic Navigation Surgery surgery[J]. Machinery and Electronics, 2010, (4): 57- 60.
doi: 10.3969/j.issn.1001-2257.2010.04.016 |
|
| 7 | 及淑芳.六自由度主操作机器人机构构型及其性能分析[D].天津:河北工业大学, 2013. |
| JI Shufang. Configuration synthesis and performance analysis of a 6-DOF master robot[D]. Tianjin: Hebei University of Technology, 2013. | |
| 8 | GREGORY A D , LIN M C , GOTTSCHALK S , et al. A framework for fast and accurate collision detection for haptic interaction[J]. Siggraph Acm Siggraph Courses, 1999, 38- 45. |
| 9 |
GILBERT E G , JOHNSON D W , KEERTHI S S . A fast procedure for computing the distance between complex objects in three-dimensional space[J]. IEEE Journal of Robotics and Automation, 1988, 4 (2): 193- 203.
doi: 10.1109/56.2083 |
| 10 | 从飞, 张秋菊. 双机器人协调系统中的碰撞问题研究[J]. 机械传动, 2017, 41 (11): 13- 16. |
| CONG Fei , ZHANG Qiuju . Research of the collision problem for dual robot coordination system[J]. Journal of Mechanical Transmission, 2017, 41 (11): 13- 16. | |
| 11 | GOTTSCHALK S, LIN M C, MANOCHA D. OBBTree: a hierarchical structure for rapid interference detection[C]//Conference on Computer Graphics & Interactive Techniques. New Orleans, USA: ACM, 1996: 171-180. |
| 12 | QUINLAN S. Efficient distance computation between non-convex objects[C]//IEEE International Conference on Robotics & Automation. San Diego, USA: IEEE, 1994: 3324-3329. |
| 13 |
MARTNEZ S B , PEREZ F I , DELPOBL A P . Collision detection between robot arms and people[J]. J Intell and Robotic Syst, 2003, 38 (1): 105- 119.
doi: 10.1023/A:1026252228930 |
| 14 |
熊勇刚, 周友行, 林峰. 多臂机器人关节间的碰撞检测研究[J]. 机械科学与技术, 2004, (7): 866- 869.
doi: 10.3321/j.issn:1003-8728.2004.07.033 |
|
XIONG Yonggang , ZHOU Youxing , LIN Feng . An algorithm for collision detection of the joints of a multi-boom robots[J]. Mechanical Science and Technology, 2004, (7): 866- 869.
doi: 10.3321/j.issn:1003-8728.2004.07.033 |
|
| 15 | 陈友东, 晏亮, 谷平平. 双机器人系统的碰撞检测算法[J]. 北京航空航天大学学报, 2013, 39 (12): 1644- 1648. |
| CHEN Youdong , YAN Liang , GU Pingping . Detection collision algorithm for two-manipulator system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39 (12): 1644- 1648. | |
| 16 |
KORB W , MARMULLA R , RACZKOWSKY J , et al. Robots in the operating theatre-chances and challenges[J]. International Journal of Oral and Maxillofacial Surgery, 2004, 33 (8): 721- 732.
doi: 10.1016/j.ijom.2004.03.015 |
| 17 |
刘达, 王田苗, 张玉茹, 等. 面向微创手术的医疗外科机器人构型综合[J]. 机器人, 2003, (2): 132- 135.
doi: 10.3321/j.issn:1002-0446.2003.02.009 |
|
LIU Da , WANG Tianmiao , ZHANG Yuru , et al. Structure synthesis of surgical robot orienting to minimally invasive surgery[J]. Robot, 2003, (2): 132- 135.
doi: 10.3321/j.issn:1002-0446.2003.02.009 |
|
| 18 | 孔康, 王树新, 张淮锋, 等. 紧凑型微创手术机器人的设计与实现[J]. 天津大学学报(自然科学与工程技术版), 2017, 50 (11): 1131- 1139. |
| KONG Kang , WANG Shuxin , ZHANG Huaifeng , et al. Design and implementation of a compact minimally invasive surgical robot[J]. Journal of Tianjin University (Science and Technology), 2017, 50 (11): 1131- 1139. | |
| 19 |
TAYLOR R H . A perspective on medical robotics[J]. Proceedings of the IEEE, 2006, 94 (9): 1652- 1664.
doi: 10.1109/JPROC.2006.880669 |
| 20 | 陈智链.空间机械臂在轨运行碰撞干涉分析方法研究[D].北京:北京邮电大学, 2015. |
| CHEN Zhilian. Research on collision analysis method for space manipulator on orbit[D]. Beijing: Beijing University of Posts and Telecommuaications, 2015. |
| [1] | 彭振华,王者超,李佳佳,乔丽苹,赵秦尼,李涵硕. 扩建地下水封洞库水封性评价与水幕系统优化[J]. 山东大学学报 (工学版), 2025, 55(2): 125-133. |
| [2] | 段升飞,杨凌霄,李静姝,高洪亮,张婉,张雄飞,齐安安,王鹏程,王浥铭,庹雄. 农村地区不同炉具和燃料排放PM1.0中多环芳烃的排放特征[J]. 山东大学学报 (工学版), 2021, 51(1): 120-127. |
| [3] | 乔凯,王启先,王勇,谢玉东. 振荡翼改进运动模型的能量捕获性能分析[J]. 山东大学学报 (工学版), 2020, 50(6): 40-47. |
| [4] | 郭英伦,郗富强,苏瑞智,李国祥,于泽庭. 基于LNG冷与燃料电池余热利用的TRCC串联系统[J]. 山东大学学报 (工学版), 2019, 49(5): 52-57. |
| [5] | 刘芳,吴广潮. 一种基于压缩矩阵的改进Apriori算法[J]. 山东大学学报 (工学版), 2018, 48(6): 82-88. |
| [6] | 曹升乐,于翠松. 水资源绝对资产负债计算方法[J]. 山东大学学报 (工学版), 2018, 48(5): 1-8. |
| [7] | 赵亚楠,王新锋,李锐,陈天舒,薛丽坤,王文兴. 大气采样干燥技术除湿效果的测试与对比[J]. 山东大学学报(工学版), 2018, 48(4): 128-136. |
| [8] | 王振德,黄兆松,蒋丽,周维芝. 铁载体在假交替单胞菌Cd2+去除中的作用[J]. 山东大学学报(工学版), 2018, 48(4): 122-127. |
| [9] | 赵子健,王芳,常发亮. 计算机辅助外科手术中医疗机器人技术研究综述[J]. 山东大学学报(工学版), 2017, 47(3): 69-78. |
| [10] | 马宗正,邵凤翔,王新莉,杨安杰. 发动机尾气温差发电装置[J]. 山东大学学报(工学版), 2016, 46(2): 122-127. |
| [11] | 刘德宝, 吴耀华, 郭耀阳, 王艳艳. 基于串并行混合拣选策略的自动拣选系统品项分配优化[J]. 山东大学学报(工学版), 2015, 45(6): 36-44. |
| [12] | 胡红春1, 石庆升2, 胡晓宇3. 烟草配送中心车辆路径的模糊DEA评价模型及应用[J]. 山东大学学报(工学版), 2013, 43(3): 38-42. |
| [13] | 吕明新1,2,宋固1,董震1,魏露露1, 赖艳华1*. 两级反射线性菲涅尔中高温集热系统热性能[J]. 山东大学学报(工学版), 2013, 43(2): 105-110. |
| [14] | 郭德栋1,2,沙爱民3. 基于微波与磁铁耦合发热效应的融雪除冰技术[J]. 山东大学学报(工学版), 2012, 42(4): 92-97. |
| [15] | 赖艳华1,王庆为1,吕明新1,邵长波2,孔德旻1. R404A/CO2复叠式制冷系统的火用分析[J]. 山东大学学报(工学版), 2011, 41(6): 115-121. |
|