山东大学学报 (工学版) ›› 2019, Vol. 49 ›› Issue (6): 36-44.doi: 10.6040/j.issn.1672-3961.0.2019.236
刘美珍1( ),周风余1,*(),李铭2,王玉刚1,陈科1
),周风余1,*(),李铭2,王玉刚1,陈科1
Meizhen LIU1(),Fengyu ZHOU1,*(),Ming LI2,Yugang WANG1,Ke CHEN1
摘要:
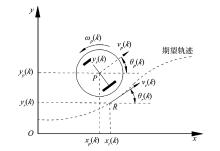
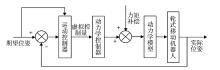
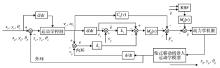
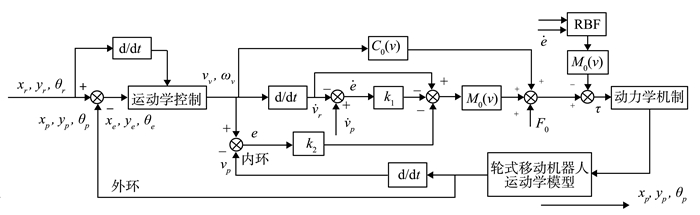
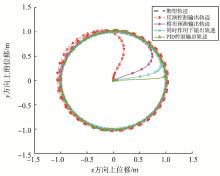
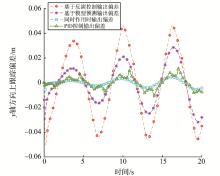
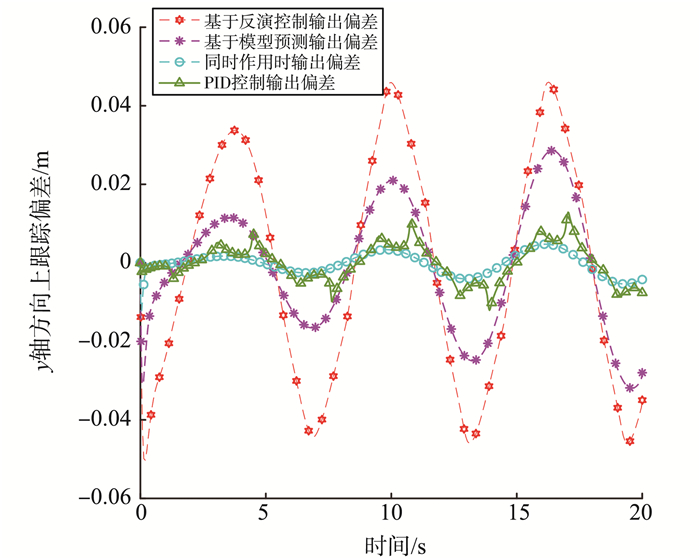
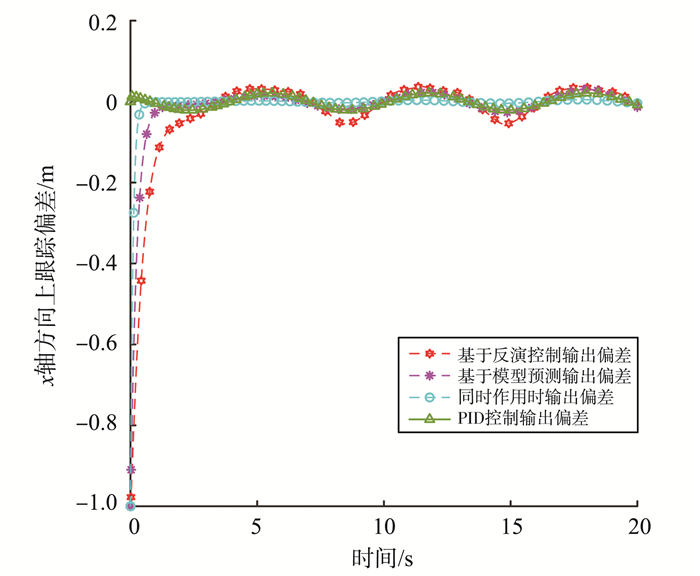
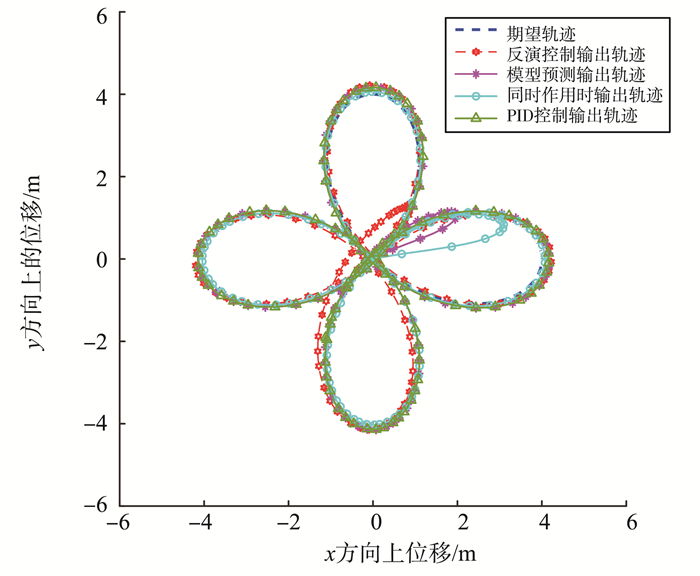
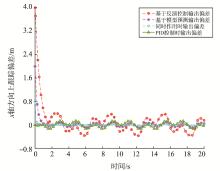
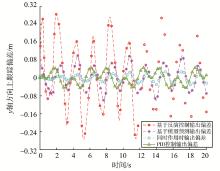
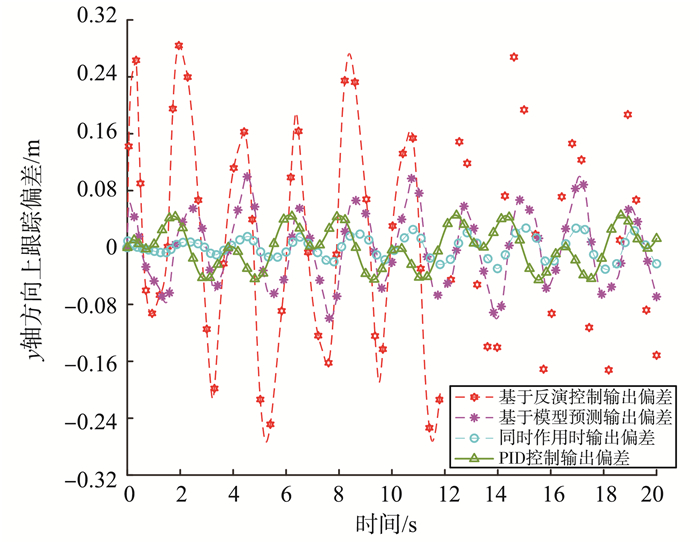
针对轮式移动机器人存在模型不确定性、非线性以及未建模的动态特性等因素,严重影响系统轨迹跟踪的稳定性和精确性,提出一种基于系统模型不确定性补偿的反演复合控制策略。基于非完整轮式移动机器人的运动学模型,采用反演控制思想以及李雅普诺夫稳定性判据设计轨迹跟踪的虚拟速度控制量,作为系统的持续激励输入。考虑轮式移动机器人具有模型不确定性和外部有界力矩干扰,根据轮式移动机器人的动力学模型推导得到系统不确定项,并采用具有高度非线性拟合特性的神经网络对其估计,得到模型的力矩控制量,且由李雅普诺夫稳定性分析得到不确定项的自适应律,实现自调整和实时轨迹跟踪。对比仿真表明,该复合控制策略能自适应的跟踪期望轨迹,与单一的反演控制、模型不确定性补偿控制策略、传统PID控制相比,均具有更好的鲁棒性和高的跟踪精度。
中图分类号:
| 1 | DUNBALIM M , MARQUES L . Robots for environmental monitoring: significant advancements and applications[J]. Robotics & Automation Magazin, 2012, 19 (1): 24- 39. |
| 2 | BAMES M , JENTSCH F . Human-robot interactions in future military operations[M]. Burlington, USA: Ashgate Publishing Company, 2010. |
| 3 | BUALAT M, FONG T, ALLAN M, et al. Surface telerobotic: development and testing of a crew controlled planetary rover system[C]//AIAA Space Conference. San Diego, USA: American Institute of Aeronautics and Astronautics Inc, 2013. |
| 4 | 丁亮.月/星球车轮地作用地面力学模型及其应用研究[D].哈尔滨:哈尔滨工业大学, 2010. |
| DING Liang. Study on ground mechanics model of wheel-ground interaction of moon/planet and its application[D]. Harbin: Harbin University of Technology, 2010. | |
| 5 | SCHMIDT K W , BOUTAILS Y S . Fuzzy discrete event systems for multiobjective control: framework and application to mobile robot navigation[J]. Fuzzy Systems: IEEE Transactions on, 2012, 20 (5): 910- 922. |
| 6 | 宋兴国.轮式机器人的移动系统建模及基于模型学习的跟踪控制研究[D].哈尔滨:哈尔滨工业大学, 2015. |
| SUN Xingguo. Modeling of wheeled robot's mobile system and tracking control based on model learning[D]. Harbin: Harbin University of Technology, 2015. | |
| 7 | XIN Xie , WANG Qinglin , SHE Jinhua , et al. Robust adaptive tracking control of wheeled mobile robot[J]. Robotics and Autonomous Systems, 2016, 78, 36- 48. |
| 8 | ROSSOMANDO F G , SORIA C , CARELLI R . Sliding mode control for trajectory tracking of a nonholonomic mobile robot using adaptive neural networks[J]. Control Engineering & Applied Informatics, 2014, 16 (1): 12- 21. |
| 9 | AISSA Bencherif, FATIMA Chouireb. Adaptive neural fuzzy control for trajectory tracking of a wheeled mobile robot[C]//2015 4th International Conference on Electrical Engineering. Boumerdes, Algeria: Institute of Electrical and Electronics Engineers Inc, 2015. |
| 10 | SHOJAEI Khoshnam , MOHAMMAD Alireza , TARAKAMEH Ahmadreza , et al. Adaptive trajectory tracking control of a differential drive wheeled mobile robot[J]. Robotica, 2011, 29 (3): 391- 402. |
| 11 | LU Xiaochun , FEI Juntao . Velocity tracking control of wheeled mobile robots by iterative learning control[J]. International Journal of Advanced Robotic Systems, 2016, 13 (3): 1- 10. |
| 12 | 陈罡, 高婷婷, 贾庆伟, 等. 带有未知参数和有界干扰的移动机器人轨迹跟踪控制[J]. 控制理论与应用, 2015, 32 (4): 491- 496. |
| CHEN Gang , GAO Tingting , JIA Qingwei , et al. Trajectory tracking control of mobile robots with unknown parameters and bounded disturbances[J]. Control Theory and Application, 2015, 32 (4): 491- 496. | |
| 13 | 朱玲, 李艳东, 孙明. 移动机器人编队的神经网络滑模控制[J]. 电机与控制学报, 2014, 18 (3): 113- 118. |
| ZHU Ling , LI Yandong , SUN Ming . Neural network sliding mode control for mobile robot formation[J]. Journal of Motor and Control, 2014, 18 (3): 113- 118. | |
| 14 | 王宗义, 李艳东, 刘涛, 等. 移动机器人的自适应模糊滑模动力学控制[J]. 哈尔滨工程大学学报, 2011, 32 (6): 792- 799. |
| WANG Zongyi , LI Yandong , LIU Tao , et al. Adaptive fuzzy sliding mode dynamics control for mobile robots[J]. Journal of Harbin University of Engineering, 2011, 32 (6): 792- 799. | |
| 15 | HWANG E , KANG H , HYUN C , et al. Robust backstepping control based on a Lyapunov redesign for skid-steered wheeled mobile robots[J]. International Journal of Advanced Robotic Systems, 2013, 10 (26): 1- 8. |
| 16 | HOU Z G , ZOU A M , CHENG L , et al. Adaptive control of an electrically driven nonholonomic mobile robot via backstepping and fuzzy approach[J]. Control Systems Technology: IEEE Transactions on, 2009, 17 (4): 803- 815. |
| 17 | CHWA D . Fuzzy adaptive tracking control of wheeled mobile robots with state-dependent kinematic and dynamic disturbances[J]. Fuzzy Systems: IEEE Transactions on, 2012, 20 (3): 587- 593. |
| 18 | DONG W , KUHNERT K D . Robust adaptive control of nonholonomic mobile robot with parameter and nonparameter uncertainties[J]. Robotics: IEEE Transactions on, 2005, 21 (2): 261- 266. |
| 19 | 沈智鹏, 张晓玲. 带扰动补偿的移动机器人轨迹跟踪反演控制[J]. 控制工程, 2019, 26 (3): 398- 404. |
| SHEN Zhipeng , ZHANG Xiaoling . Backstepping control for trajectory tracking of mobile robots with disturbance compensation[J]. Control Engineering, 2019, 26 (3): 398- 404. | |
| 20 | 吴卫国, 陈辉堂, 王月娟. 移动机器人的全局轨迹跟踪控制[J]. 自动化学报, 2001, 27 (3): 326- 331. |
| WU Weiguo , CHEN Huitang , WANG Yuejuan . Global trajectory tracking control of mobile robots[J]. Journal of Automation, 2001, 27 (3): 326- 331. | |
| 21 | ZHOU Yang, ZHOU Fengyu, WANG Da, et al. Path-tracking of mobile robot using feedback-aided P-type iterative learning control against initial state error[C]//2017 IEEE 6th Data Driven Control and Learning Systems Conference. Chongqing, China: IEEE, 2017: 587-592. |
| 22 | JIANG Z P , NIJMEUJER H . Tracking control of mobile robots: a case study in backstepping[J]. Automatica, 1997, 33 (7): 1393- 1399. |
| 23 | 郑大钟. 线性系统理论[M]. 北京: 清华大学出版社, 2002. |
| 24 | FENG G . A compensation scheme for robot tracking based on neural networks[J]. Robotics and Autonomous Systems, 1995, 15, 100- 206. |
| 25 | MARY A D , MATHEW A T , JACOB J . Robust H-infinity: stabilization of uncertain wheeled mobile robots[J]. Global Journal of Researches in Engineering Electrical and Electronics Engineering, 2012, 12 (1): 22- 31. |
| 26 | WANG Xiaojing , LIU Meizhen , CHEN Shuai , et al. PID-PFC control of continuous rotary electro-hydraulic servo motor applied to simulator[J]. The Journal of Engineering, 2019, 13, 138- 143. |
| [1] | 张玉婷,李望,王晨光,刘友权,侍红军. 不连续耦合的时滞复杂动态网络的同步[J]. 山东大学学报(工学版), 2017, 47(4): 43-49. |
| [2] | 李艳芳,刘允刚 . 一类参数不确定系统的输出反馈自适应镇定[J]. 山东大学学报(工学版), 2006, 36(6): 76-81 . |
|