山东大学学报 (工学版) ›› 2019, Vol. 49 ›› Issue (6): 45-54.doi: 10.6040/j.issn.1672-3961.0.2018.495
孔令龙( ),田国会*()
),田国会*()
Linglong KONG(),Guohui TIAN*()
摘要:
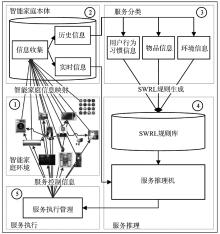
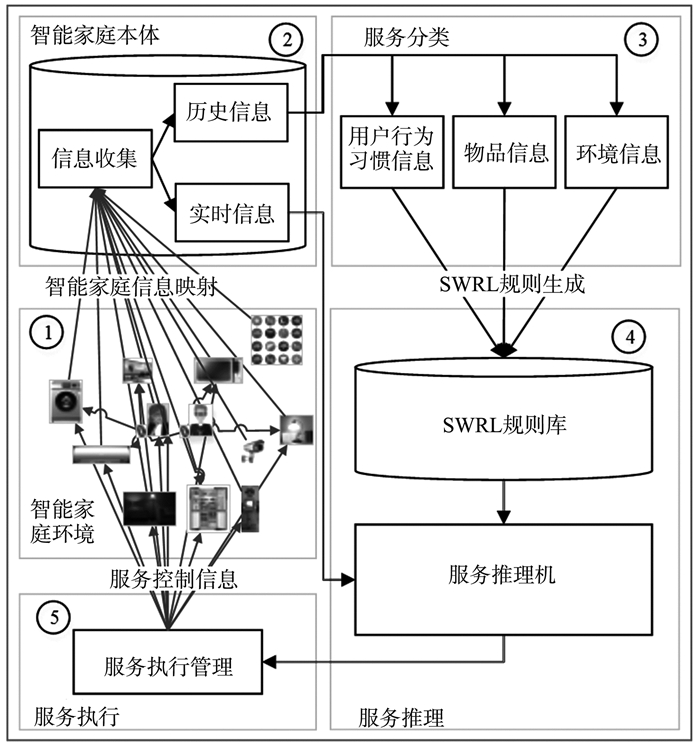
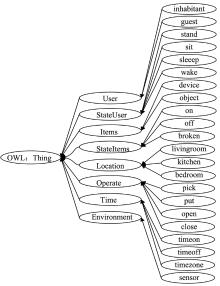
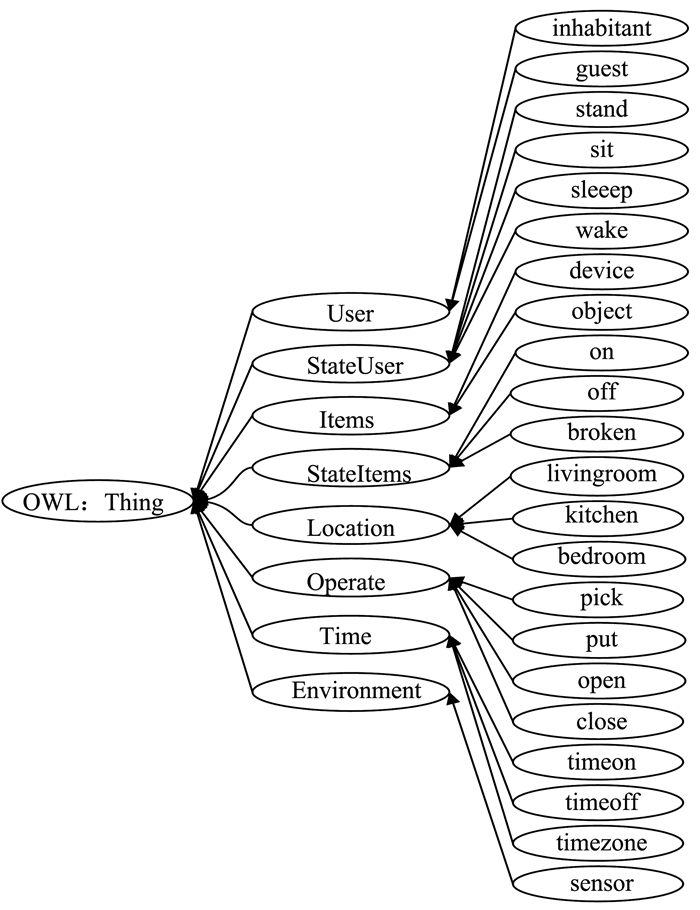
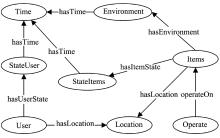
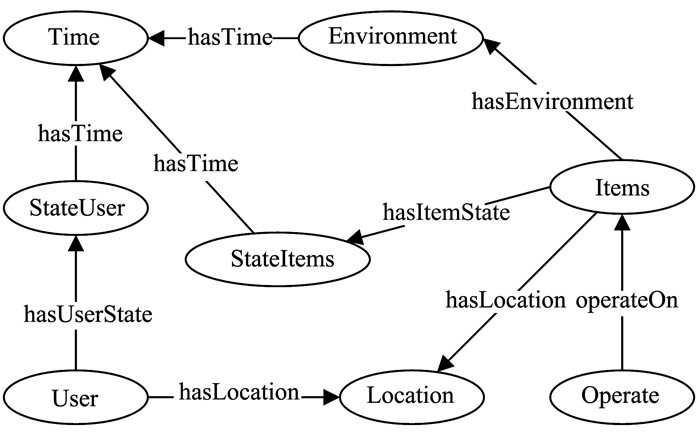
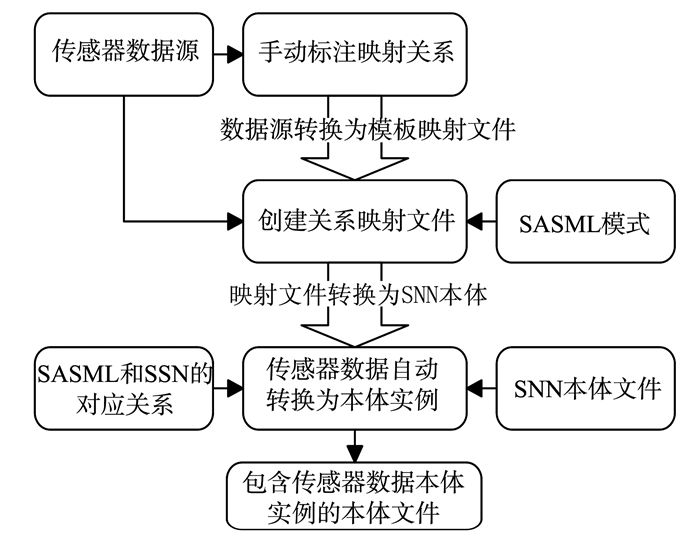
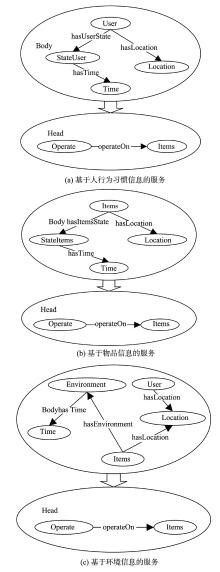
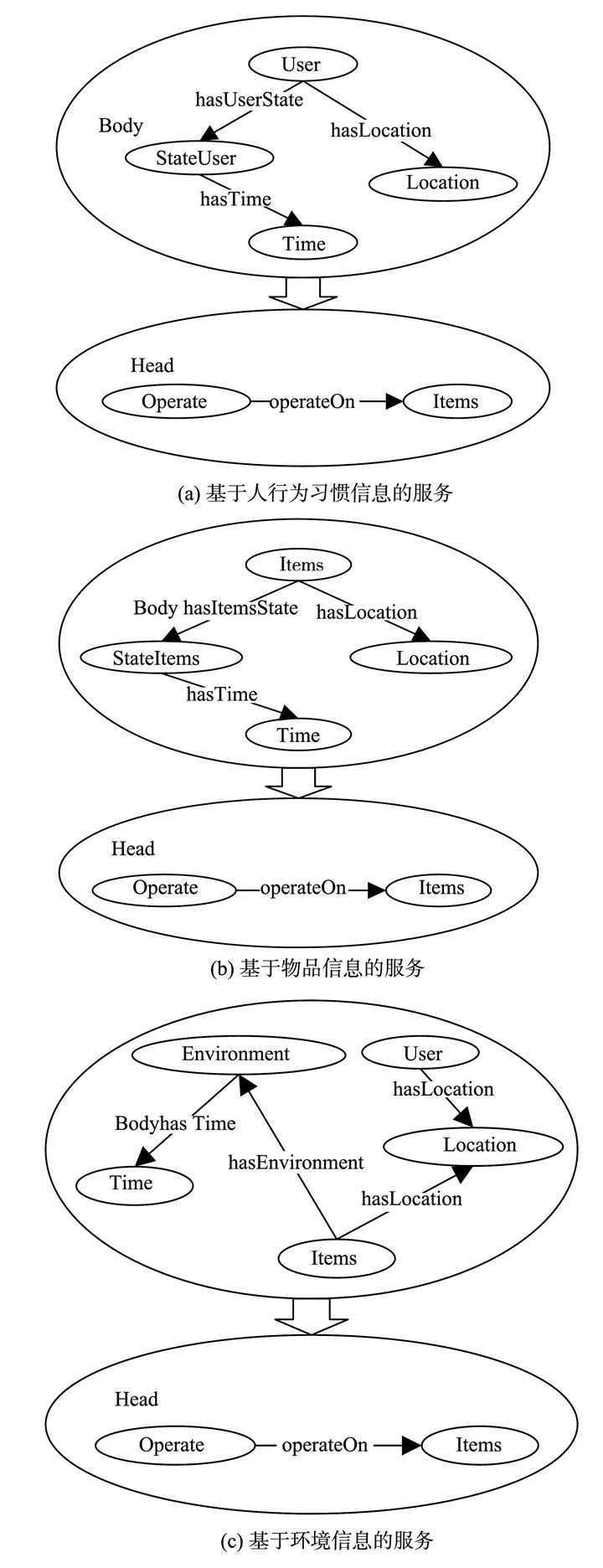
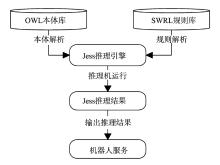
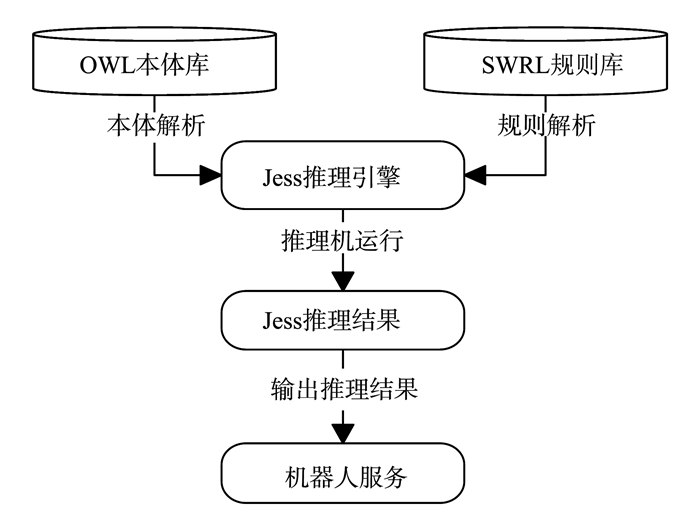
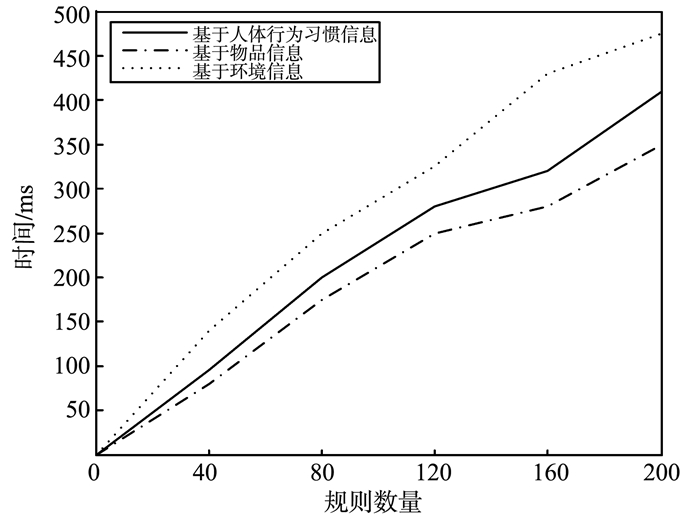
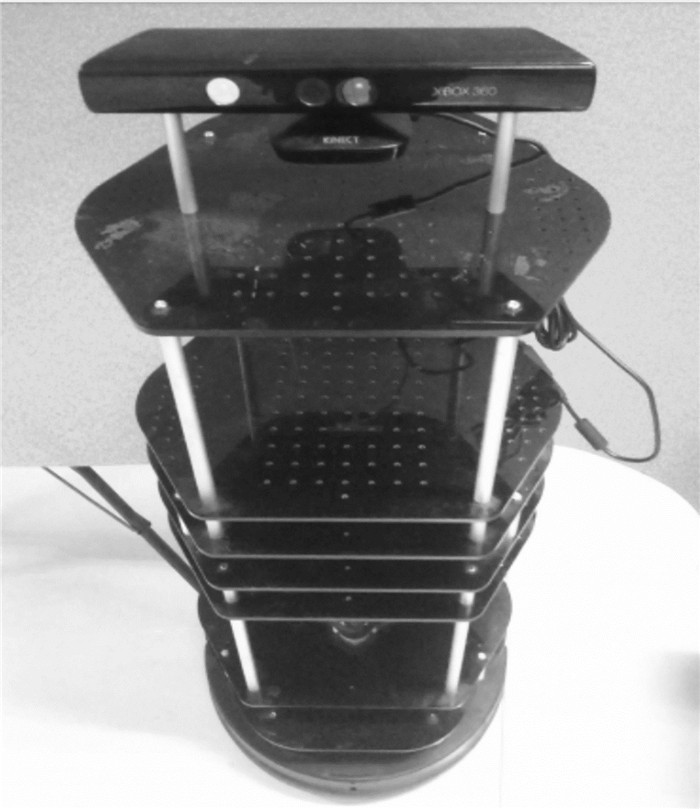
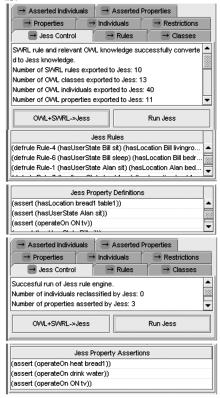
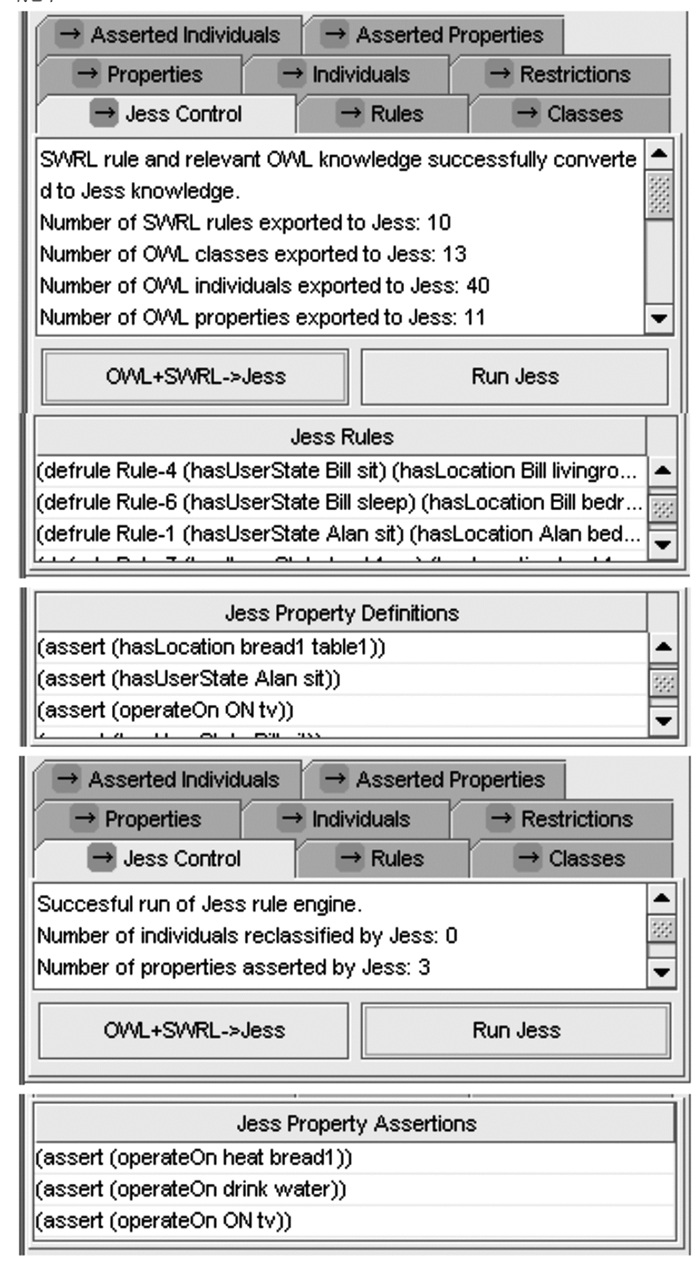
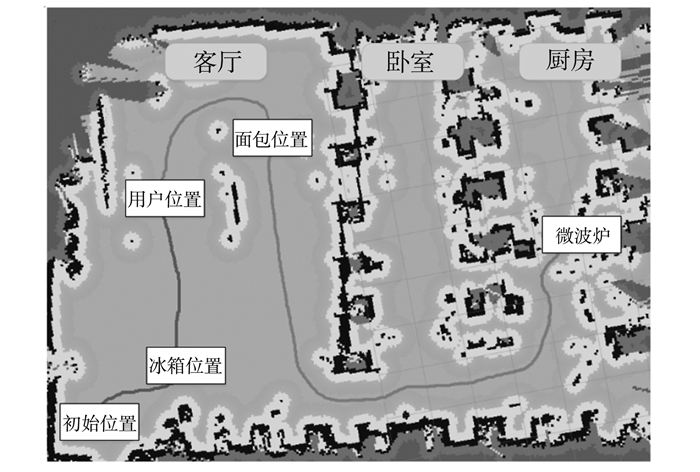
为增强机器人提供不同类型服务的能力,针对智能家庭环境中的服务机器人提出一种基于语义网规则语言的机器人分类服务推理方法。利用本体技术建立智能家庭的本体模型,通过该模型集成来自不同数据源的数据,消除设备之间的异构性。根据智能家庭机器人服务系统的服务特点划分服务类型,利用历史上下文信息生成服务规则库。通过推理引擎匹配实时的上下文信息与服务规则实现机器人的服务推理。智能家庭背景下的系统运行试验结果表明,机器人服务推理方法能够完成智能家庭环境中不同类型的服务推理,从而进一步提高机器人服务的智能性。
中图分类号:
| 1 | MITZNER T L , CHEN T L , KEMP C C , et al. Identifying the potential for robotics to assist older adults in different living environments[J]. International Journal of Social Robotics, 2014, 6 (2): 213- 227. |
| 2 | KRISHNAN R H , PUGAZHENTHI S . Mobility assistive devices and self-transfer robotic systems for elderly: a review[J]. Intelligent Service Robotics, 2014, 7 (1): 37- 49. |
| 3 | 丁满, 袁梦娟, 白仲航, 等. 基于用户无意识行为的服务机器人交互设计[J]. 包装工程, 2018, 39 (10): 91- 95. |
| DING Man , YUAN Mengjuan , BAI Zhonghang , et al. Interaction design of service robot based on user's unconscious behavior[J]. Packaging Engineering, 2018, 39 (10): 91- 95. | |
| 4 | 王天然, 库涛, 朱云龙, 等. 智能制造空间[J]. 信息与控制, 2017, 46 (6): 641- 645. |
| WANG Tianran , KU Tao , ZHU Yunlong , et al. Smart manufacturing space[J]. Information and Control, 2017, 46 (6): 641- 645. | |
| 5 | 张国梁, 李秀智, 徐涛, 等. 基于RTM的自主服务机器人智能化分散控制[J]. 北京工业大学学报, 2017, 43 (7): 969- 977. |
| ZHANG Guoliang , LI Xiuzhi , XU Tao , et al. Intelligent distributed control of autonomous service robots based on RTM[J]. Journal of Beijing University of Technology, 2017, 43 (7): 969- 977. | |
| 6 | CIRILLO M, KARLSSON L, SAFFIOTTI R. Human-aware task planning for mobile robots[C]//International Conference on Advanced Robotics. Munich, Germany: IEEE, 2009: 1-7. |
| 7 |
屠大维, 江济良, 许烁, 等. 移动作业助老助残服务机器人人机协作:认知建模及其应用[J]. 高技术通讯, 2012, 22 (12): 1257- 1263.
doi: 10.3772/j.issn.1002-0470.2012.12.007 |
|
TU Dawei , JIANG Jiliang , XU Shuo , et al. Human-robot collaboration of mobile robots for aged and disabled assistance: cognition modelling and application[J]. High Technology Letters, 2012, 22 (12): 1257- 1263.
doi: 10.3772/j.issn.1002-0470.2012.12.007 |
|
| 8 | HORRIDGE M , BECHHOFER S . The OWL API: a Java API for OWL ontologies[J]. Semantic Web, 2011, 2 (1): 11- 21. |
| 9 | 宋沐民, 路飞, 陆娜, 等. 智能空间下基于分层任务网络的服务机器人任务规划[J]. 控制理论与应用, 2014, 31 (7): 901- 907. |
| SONG Mumin , LU Fei , LU Na , et al. Task planning for service robot with hierarchical task network in intelligent space[J]. Control Theory & Applications, 2014, 31 (7): 901- 907. | |
| 10 | 张梦洋, 田国会, 龚京, 等. 基于本体知识库的服务决策机制的设计方法[J]. 华中科技大学学报(自然科学版), 2017, 45 (10): 70- 74. |
| ZHANG Mengyang , TIAN Guohui , GONG Jing , et al. Design method of service decision mechanism based on ontology knowledge base[J]. Journal of Huazhong University of Science and Technology(Nature Science Edition), 2017, 45 (10): 70- 74. | |
| 11 | LI Y, JIANG L, YIN Q, et al. Robot task planning based on state semantic network[C]//10th International Conference on Intelligent Computation Technology and Automation. Changsha, China: IEEE, 2017: 420-424. |
| 12 | 路飞, 田国会, 李擎. 智能空间环境下基于本体的机器人服务自主认知及规划[J]. 机器人, 2017, 39 (4): 423- 430. |
| LU Fei , TIAN Guohui , LI Qing . Autonomous cognition and planning of robot service based on ontology in intelligent space environment[J]. Robot, 2017, 39 (4): 423- 430. | |
| 13 |
GALINDO C , SAFFIOTTI A . Inferring robot goals from violations of semantic knowledge[J]. Robotics and Autonomous Systems, 2013, 61 (10): 1131- 1143.
doi: 10.1016/j.robot.2012.12.007 |
| 14 |
路飞, 李健, 田国会, 等. 基于参数驱动机制的服务机器人任务自动组合方法[J]. 高技术通讯, 2014, 24 (2): 157- 164.
doi: 10.3772/j.issn.1002-0470.2014.02.008 |
|
LU Fei , LI Jian , TIAN Guohui , et al. An automatic approach for service composition of service robots based on parameter-driven mechanism[J]. High Technology Letters, 2014, 24 (2): 157- 164.
doi: 10.3772/j.issn.1002-0470.2014.02.008 |
|
| 15 | ZHU H , JING L , WANG Y . Knowledge representation and semantic inference of process based on ontology and semantic web rule language[J]. Transactions of Nanjing University of Aeronautics and Astronautics, 2017, 34 (1): 72- 80. |
| 16 | 赖天武, 吴伟民, 王静, 等. 基于Jess和机器学习的Robocode策略研究与实现[J]. 系统仿真学报, 2006, 18 (增刊2): 912- 915. |
| LAI Tianwu , WU Weimin , WANG Jing , et al. Research and implementation of robocode decision-making system based on Jess and machine learning[J]. Journal of System Simulation, 2006, 18 (Suppl.2): 912- 915. | |
| 17 | MAEDCHE A , STAAB S . Ontology learning for the semantic web[J]. IEEE Intelligent Systems, 2001, 16 (2): 72- 79. |
| 18 | BECHHOFER S . OWL: Web ontology language[J]. Encyclopedia of Information Science & Technology Second Edition, 2004, 63 (45): 990- 996. |
| 19 | COMPTON M , BARNAGHI P , BERMUDEZ L , et al. The SSN ontology of the W3C semantic sensor network incubator group[J]. Web Semantics: Science, Services and Agents on the World Wide Web, 2012, 17 (4): 25- 32. |
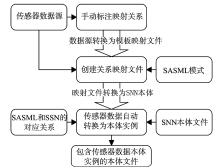
| 20 | ZHANG X , ZHAO Y , LIU W . A method for mapping sensor data to SSN ontology[J]. International Journal of Hybrid Information Technology, 2015, 8 (6): 303- 316. |
| [1] | 尹磊,周风余,李铭,王玉刚,郭银博,陈科. 基于微服务的服务机器人云服务设计方法[J]. 山东大学学报 (工学版), 2019, 49(6): 55-62. |
| [2] | 李庆冬,骆伟超,叶瑛歆,张承瑞,胡天亮. 基于本体的机床设备资源共享机制[J]. 山东大学学报(工学版), 2017, 47(3): 130-138. |
| [3] | 陈宏兴, 周风余, 田天, 姜志飞, 陈竹敏. 服务机器人云计算平台SOA接口层模型设计[J]. 山东大学学报(工学版), 2015, 45(4): 31-39. |
| [4] | 李国栋,赵威,田国会*,薛英花. 一种基于旋转矩阵分解的视觉伺服控制算法[J]. 山东大学学报(工学版), 2012, 42(1): 45-50. |
| [5] | 田国会,宋保业. 一种面向物品定位的射频标签定位方法[J]. 山东大学学报(工学版), 2011, 41(5): 26-31 . |
| [6] | 周风余,田国会,郭丹,周祥章. 助老助残服务机器人机载计算机软件系统设计及实现[J]. 山东大学学报(工学版), 2011, 41(1): 32-39. |
| [7] | 田国会,李晓磊,赵守鹏,路飞 . 家庭服务机器人智能空间技术研究与进展[J]. 山东大学学报(工学版), 2007, 37(5): 53-59 . |
|