山东大学学报 (工学版) ›› 2020, Vol. 50 ›› Issue (3): 125-132.doi: 10.6040/j.issn.1672-3961.0.2019.004
任昭鹏1( ),奚瑞1,王生海1,张志江2,陈海泉1,*()
),奚瑞1,王生海1,张志江2,陈海泉1,*()
Zhaopeng REN1(),Rui XI1,Shenghai WANG1,Zhijiang ZHANG2,Haiquan CHEN1,*()
摘要:
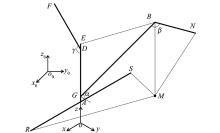
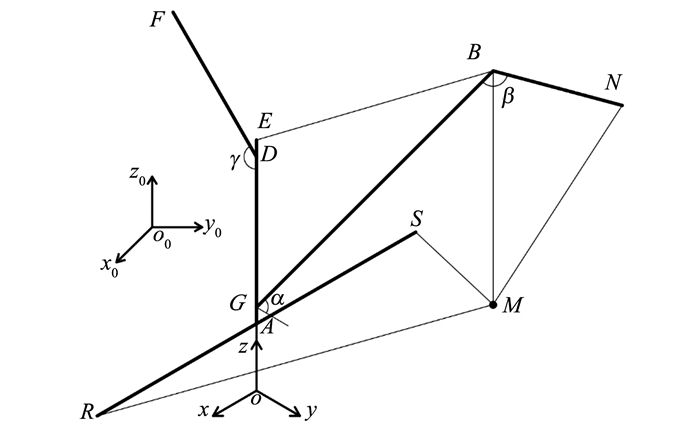
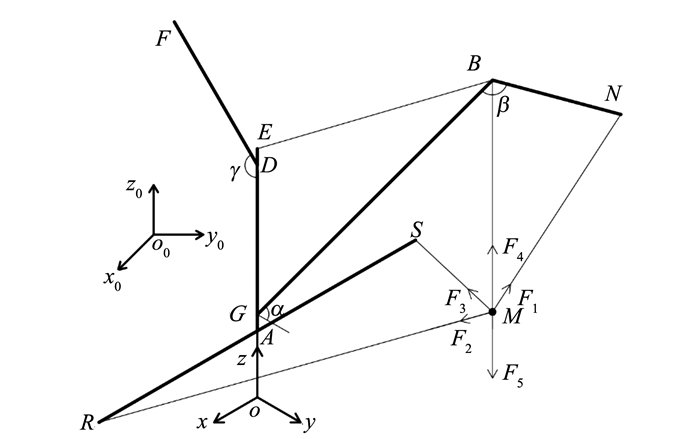
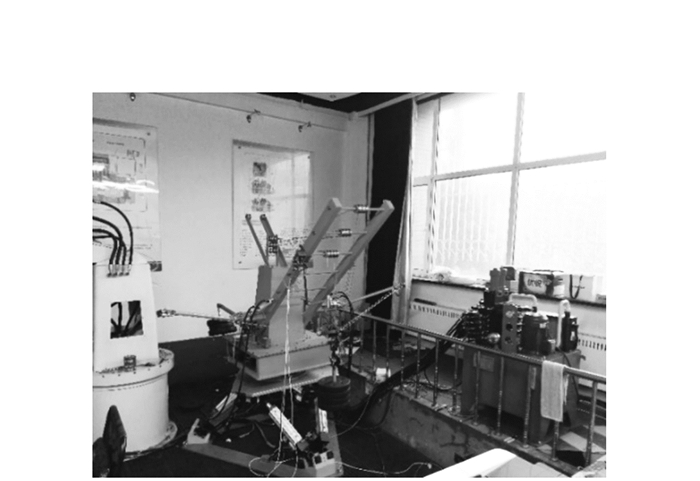
针对如何减小吊重的摇摆问题,设计一种基于三索限位的机械式防摇摆装置。利用3根防摇索牵引吊钩,限制吊重的空间位置,实现防止吊重摇摆的目的。建立起重机的运动学模型,分析工作过程中3根防摇索的长度变化。建立吊重系统的动力学模型,分析防摇摆过程中3根防摇索的张力设定与防摇摆效果的关系。搭建船用起重机防摇摆装置试验平台进行验证,证明了所提出的防摇摆控制方案的正确性,所设计的防摇摆装置在实际应用中具有良好的防摇摆效果,整体防摇摆效果可以达到61%以上。
中图分类号:
| 1 |
徐军, 汪伟刚. 起重机防摇控制研究综述[J]. 造船技术, 2013, (2): 25- 30.
doi: 10.3969/j.issn.1000-3878.2013.02.008 |
|
XU Jun , WANG Weigang . The research summary on anti-swing control of crane[J]. Marine Technology, 2013, (2): 25- 30.
doi: 10.3969/j.issn.1000-3878.2013.02.008 |
|
| 2 | 王生海, 于光超, 张志江, 等. 回转起重机防摇试验台设计与实验[J]. 船舶工程, 2015, 37 (增刊1): 113- 116. |
| WANG Shenghai , YU Guangchao , ZHANG Zhijiang , et al. Design and test of anti-sway test bed for rotary crane[J]. Ship Engineering, 2015, 37 (Suppl.1): 113- 116. | |
| 3 |
张建平. 集装箱起重机吊具防摇和防扭技术[J]. 港口装卸, 2012, (6): 8- 11.
doi: 10.3963/j.issn.1000-8969.2012.06.003 |
|
ZHANG Jianping . Swirling and shaking proof technology for spreader of container crane[J]. Port Operation, 2012, (6): 8- 11.
doi: 10.3963/j.issn.1000-8969.2012.06.003 |
|
| 4 | KIMIAGHALAM Bahram, HOMAIFAR Abdollah, BIKDASH Marwan, et al. Feedforward control law for a shipboard crane with maryland rigging system[C]//Proceedings of the American Control Conference. Chicago, US: IEEE, 2000: 1047-1051. |
| 5 | AMICHAEL J, BIRD J Dexter, GREEN Jeffrey P, et al. Pendulation control system with active rider block tagline system for shipboard cranes: US7367464B1[P]. 2008-06-05. |
| 6 |
王金诺, 徐保林. 集装箱起重机刚性减摇系统的动态仿真[J]. 铁道学报, 1995, 17 (1): 34- 40.
doi: 10.3321/j.issn:1001-8360.1995.01.006 |
|
WANG Jinnuo , XU Baolin . Dynamic simulation of rigid antisway system of container crane[J]. Journal of the China Railway Society, 1995, 17 (1): 34- 40.
doi: 10.3321/j.issn:1001-8360.1995.01.006 |
|
| 7 |
王阳. 船用起重机防摇装置设计研究[J]. 舰船科学技术, 2013, 35 (7): 105- 108.
doi: 10.3404/j.issn.1672-7649.2013.07.022 |
|
WANG Yang . Research and design of an anti-swing mechanism for a shipborne crane[J]. Ship Science and Technology, 2013, 35 (7): 105- 108.
doi: 10.3404/j.issn.1672-7649.2013.07.022 |
|
| 8 | 周勇, 黎钧琪. 集装箱起重机的模糊防摇控制[J]. 交通科技, 2003, (1): 45- 47. |
| ZHOU Yong , LI Junqi . Anti-sway cControl of container cCrane by fuzzy control[J]. Transportation Science & Technology, 2003, (1): 45- 47. | |
| 9 |
杨立秋, 宋立忠. 基于模糊控制的船用起重机消摆控制[J]. 船电技术, 2010, 30 (5): 26- 29.
doi: 10.3969/j.issn.1003-4862.2010.05.008 |
|
YANG Liqiu , SONG Lizhong . Pendulation reduction control of ship-mounted crane based on fuzzy control[J]. Marine Electric Electronic Engineering, 2010, 30 (5): 26- 29.
doi: 10.3969/j.issn.1003-4862.2010.05.008 |
|
| 10 |
SPATHOPOULOS M , FRAGOPOULOS D . Pendulation control of an offshore crane[J]. International Journal of Control, 2004, 77 (7): 654- 670.
doi: 10.1080/00207170410001703403 |
| 11 | ALBADA Van, SIEBE B. A novel approach to anti-sway control for marine shipboard cranes[C]//Proceedings-27th European Conference on Modelling and Simulation. Aalesund, Norway: ECMS, 2013. |
| 12 | PARKER Gordon, GRAZIANO Michael, LEBAN Frank, et al. Reducing crane payload swing using a rider block tagline control system[C]//OCEANS 2007 — Europe. Aberdeen, UK: IEEE, 2007. |
| 13 | FANG Yongchun, WANG Pengcheng. Advanced nonlinear control of an offshore boom crane[C]//2012 American Control Conference (ACC). Montreal, Canada: IEEE, 2012. |
| 14 |
韩广冬, 张桐, 陈海泉, 等. 船用起重机减摇装置建模与试验[J]. 科学技术与工程, 2017, 17 (23): 305- 310.
doi: 10.3969/j.issn.1671-1815.2017.23.051 |
|
HAN Guangdong , ZHANG Tong , CHEN Haiquan , et al. Anti-swing device modelling and experiment of ship-mounted crane[J]. Science Technology and Engineering, 2017, 17 (23): 305- 310.
doi: 10.3969/j.issn.1671-1815.2017.23.051 |
|
| 15 | 韩广冬, 张桐, 陈海泉, 等. 船用起重机吊重摇摆的动态分析[J]. 山东大学学报(工学版), 2017, 47 (1): 112- 118. |
| HAN Guangdong , ZHANG Tong , CHEN Haiquan , et al. Payload pendulation dynamic analysis of ship-mounted crane[J]. Journal of Shandong University (Engineering Science), 2017, 47 (1): 112- 118. | |
| 16 | YESILDIREN Aydin. Anti-swing control of underactuated overhead crane system using multiple Lyapunov functions[C]//Proceedings of 2011 IEEE International Conference on Mechatronics and Automation. Beijing, China: IEEE, 2011. |
| 17 | AHMAD Ma, NASIR Ank, HAMBALI N, et al. Hybrid input shaping and PD-type fuzzy logic control scheme of a gantry crane system[C]//Proceedings of 2009 IEEE Control Application(CCA) & Intelligent Control (ISIC). St. Petersburg, Russia: IEEE, 2009. |
| 18 |
CHO S K , LEE H H . A fuzzy-logic anti-swing controller for three dimensional overhead cranes[J]. Isa Transactions, 2002, 41 (2): 235- 243.
doi: 10.1016/S0019-0578(07)60083-4 |
| 19 |
NAM Kug Ku , JU Hwan Cha , MYUNG Il Roh , et al. A tagline proportional-derivative control method for the anti-swing motion of a heavy load suspended by a floating crane in waves[J]. Proceedings of the Institution of Mechanical Engineers Part M: Journal of Engineering for the Maritime Environment, 2013, 227 (4): 357- 366.
doi: 10.1177/1475090212445546 |
| 20 |
QIAN Yuzhe , FANG Yongchun , LU Biao . Adaptive repetitive learning control for an offshore boom crane[J]. Automatica, 2017, 82, 21- 28.
doi: 10.1016/j.automatica.2017.04.003 |
| 21 |
QIAN Yuzhe , FANG Yongchun , LU Biao . Adaptive robust tracking control for an offshore ship-mounted crane subject to unmatched sea wave disturbances[J]. Mechanical Systems and Signal Processing, 2019, 114, 556- 570.
doi: 10.1016/j.ymssp.2018.05.009 |
| 22 |
钟斌, 程文明, 马莉丽, 等. 起重机小车吊重动力学系统状态空间重构[J]. 西南交通大学学报, 2007, 42 (4): 436- 441.
doi: 10.3969/j.issn.0258-2724.2007.04.010 |
|
ZHONG Bin , CHENG Wenming , MA Lili , et al. Reconstruction of state space of the trolley-load dynamic system in overhead or gantry cranes[J]. Journal of Southwest Jiaotong University, 2007, 42 (4): 436- 441.
doi: 10.3969/j.issn.0258-2724.2007.04.010 |
|
| 23 |
唐远洋, 肖健梅, 王锡淮. 基于MATLAB集装箱起重机防摇系统仿真[J]. 机电设备, 2008, 25 (3): 52- 55.
doi: 10.3969/j.issn.1005-8354.2008.03.015 |
|
TANG Yuanyang , XIAO Jianmei , WANG Xihuai . Simulation of the anti-sway system of container crane based on MATLAB[J]. Mechanical and Electrical Equipment, 2008, 25 (3): 52- 55.
doi: 10.3969/j.issn.1005-8354.2008.03.015 |
|
| 24 |
刘宏宇. 南盘江大桥缆索起重机缆索系统设计[J]. 铁道建筑技术, 2013, (9): 52- 55.
doi: 10.3969/j.issn.1009-4539.2013.09.014 |
|
LIU Hongyu . Design on the cable system for cable crane used in Nanpangjiang Bridge[J]. Railway Construction Technology, 2013, (9): 52- 55.
doi: 10.3969/j.issn.1009-4539.2013.09.014 |
|
| 25 | 程文明, 钟斌, 马莉丽, 等. 集装箱起重机液压减摇系统的主要影响因素[J]. 西南交通大学学报, 2008, 43 (1): 40- 44. |
| CHENG Wenming , ZHONG Bin , MA Lili , et al. Factors influencing porformances of hydraulic anti-sway system for container cranes[J]. Journal of Southwest Jiaotong University, 2008, 43 (1): 40- 44. |
| [1] | 朱向前,魏峥嵘,裴彦良,于凯本,宗乐. 深拖地震线列阵的动力学建模与位置预报[J]. 山东大学学报 (工学版), 2020, 50(6): 9-16. |
| [2] | 韩广冬,张桐,陈海泉,王生海,张金男. 船用起重机吊重摇摆的动态分析[J]. 山东大学学报(工学版), 2017, 47(1): 112-118. |
|