山东大学学报 (工学版) ›› 2019, Vol. 49 ›› Issue (5): 119-126.doi: 10.6040/j.issn.1672-3961.0.2018.396
• 机器学习与数据挖掘 • 上一篇
吴禹均( ),吴巍,郭毓*(),郭健
),吴巍,郭毓*(),郭健
Yujun WU(),Wei WU,Yu GUO*(),Jian GUO
摘要:
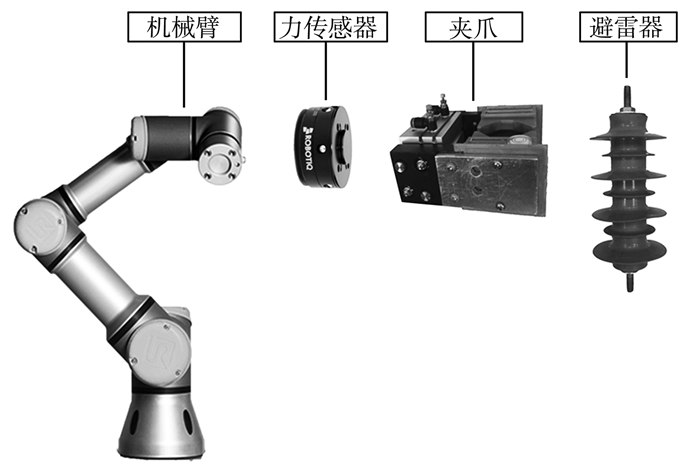
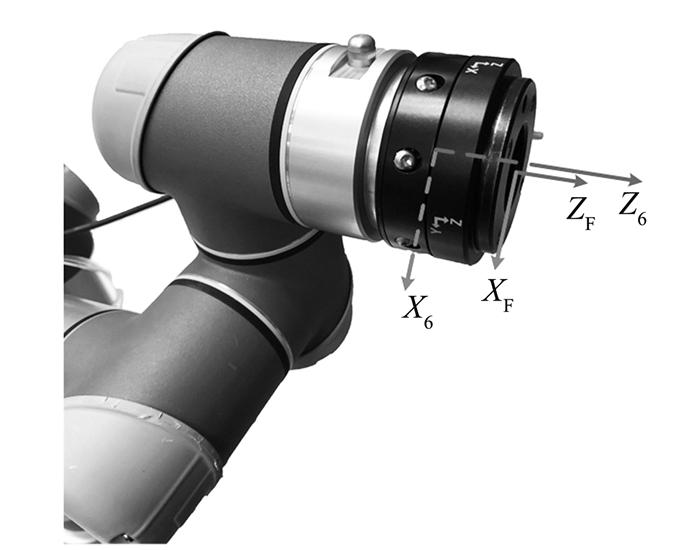
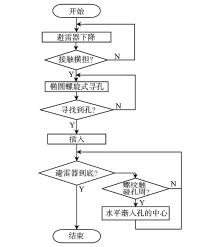
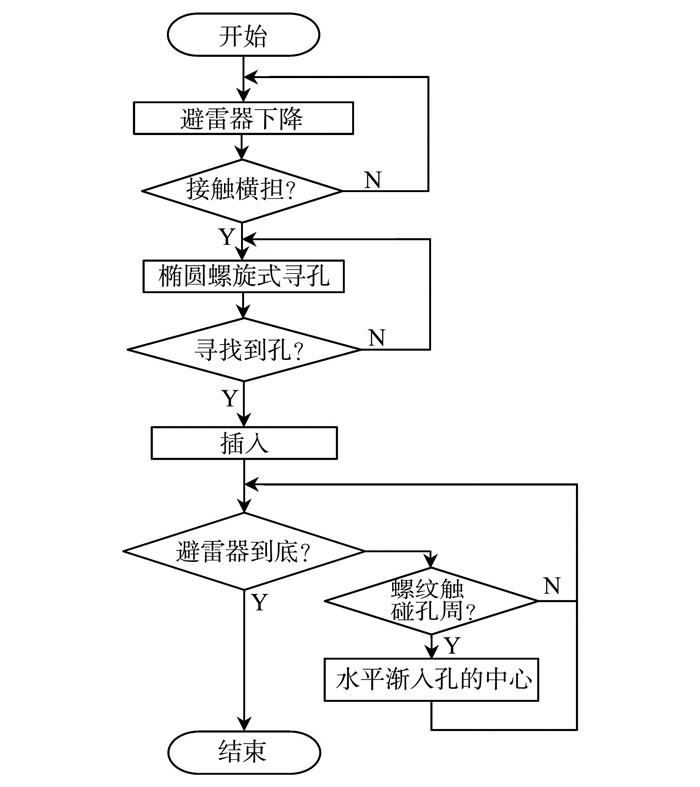
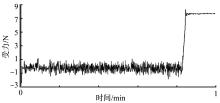
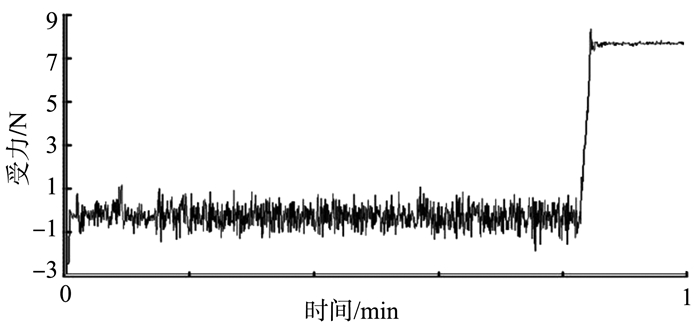
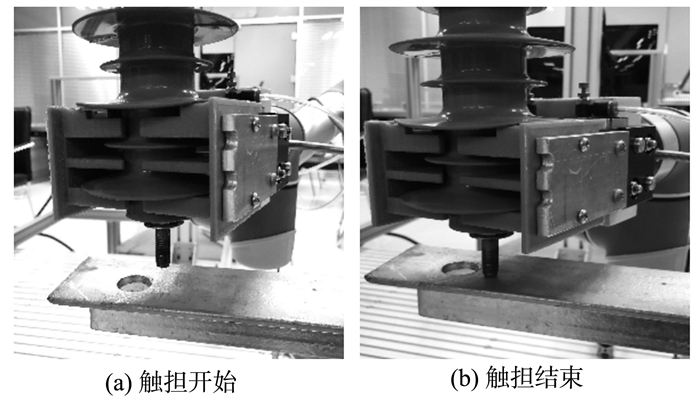
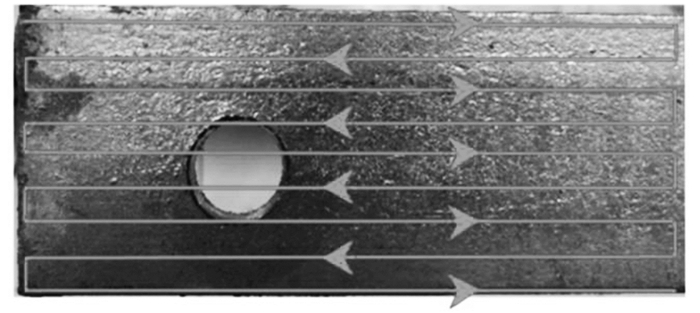
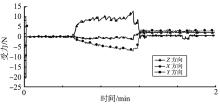
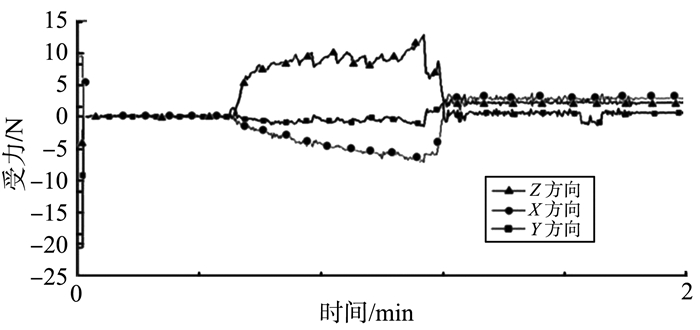
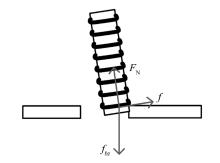
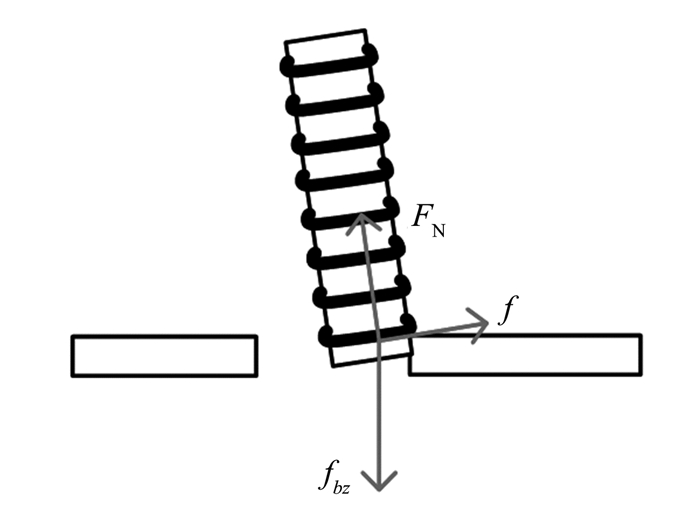
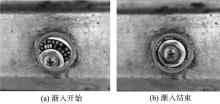
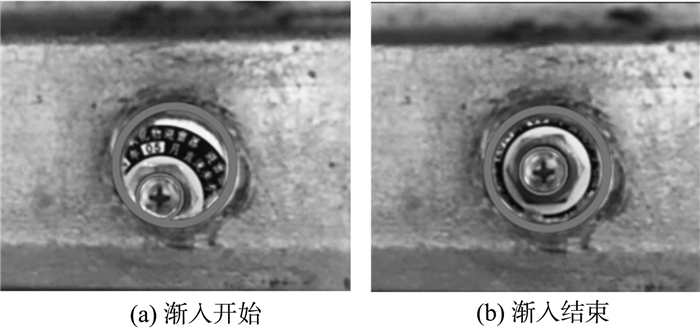
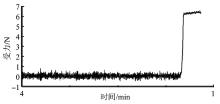
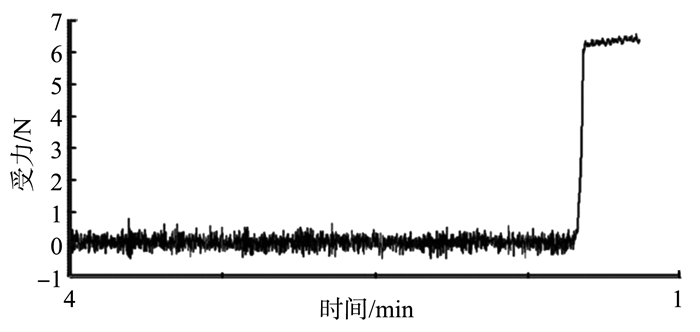
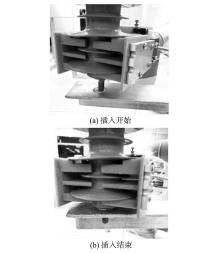
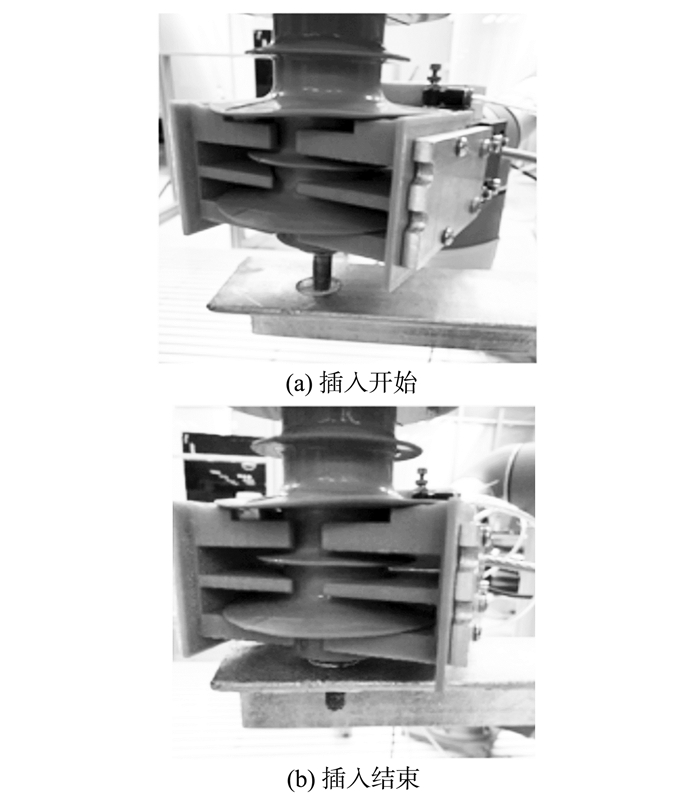
针对带电作业机器人更换金属氧化物避雷器过程中精确对孔装配的需要,提出一种基于力觉自主控制机器人在绝缘横担上寻孔并装配避雷器的方法。控制过程中针对避雷器下端头的特殊形状以及电杆绝缘横担的作业场景,在机器人末端加装力觉传感器,将转换后的力作为被控量,设计一种由触担、寻孔、渐入和插入四个过程构成的对孔装配策略,使机器人能够将避雷器的下端头准确地插入横担上的安装孔。试验结果验证了所提方法的有效性。
中图分类号:
| 1 | 刘起蕊.配电网不间断供电检修技术的研究[D].广州:华南理工大学, 2014. |
| LIU Qirui. Research of operation technology with continuous power supply for distribution network[D]. Guangzhou: South China University of Technology, 2014. | |
| 2 | TAKAOKA K, YOKOYAMA K, WAKISAKO H, et al. Development of the fully-automatic live-line maintenance robot-Phase Ⅲ[C]//Assembly and Task Planning, 2001: Proceedings of the IEEE International Symposium on. Fukuoka, Japan: IEEE, 2001: 423-428. |
| 3 | 高焕兵.带电抢修作业机器人运动分析与控制方法研究[D].济南:山东大学, 2015. |
| GAO Huanbing. Research on motion analysis and control methods of live-working robot for emergency repair[D]. Jinan: Shandong University, 2015. | |
| 4 | 邹德华, 江维, 吴功平, 等. 输电线路绝缘子更换带电作业机器人控制方法[J]. 高压电器, 2016, 52 (10): 92- 98. |
| ZOU Dehua , JIANG Wei , WU Gongping , et al. Robot control method of live working for transmission line insulator replacement[J]. High Voltage Apparatus, 2016, 52 (10): 92- 98. | |
| 5 | 罗俊.绝缘子带电更换作业机器人研究及应用[D].长沙:长沙理工大学, 2016. |
| LUO Jun. Research and application of the robot for live line replacement of insulator[D]. Changsha: Changsha University of Science and Technology, 2016. | |
| 6 | 江维, 吴功平, 王伟, 等. 带电作业机器人机械臂动力学建模与运动规划[J]. 工程科学学报, 2016, 38 (6): 867- 875. |
| JIANG Wei , WU Gongping , WANG Wei , et al. Manipulator dynamic modeling and motion planning for live working robot[J]. Chinese Journal of Engineering, 2016, 38 (6): 867- 875. | |
| 7 |
赵玉良, 戚晖, 李健, 等. 高压带电作业机器人系统的研制[J]. 制造业自动化, 2012, 34 (5): 114- 117.
doi: 10.3969/j.issn.1009-0134.2012.3(s).37 |
|
ZHAO Yuliang , QI Hui , LI Jian , et al. Design on the live working robot system[J]. Manufacturing Automation, 2012, 34 (5): 114- 117.
doi: 10.3969/j.issn.1009-0134.2012.3(s).37 |
|
| 8 | 刘金存.带电作业机器人主从控制的研究[D].济南:山东建筑大学, 2014. |
| LIU Jincun. Master-slave control research of live working robot[D]. Jinan: Shandong University of Architecture, 2014. | |
| 9 | 朱阳光.基于力信息的机器人主动柔顺装配研究[D].南京:南京理工大学, 2003. |
| ZHU Yangguang. Research on active compliance assembly of robot based on force information[D]. Nanjing: Nanjing University of Science and Technology, 2003. | |
| 10 |
黄冠成, 陈新度. 工业机器人末端执行器的柔顺示教研究[J]. 机械设计与制造, 2017, (12): 255- 257.
doi: 10.3969/j.issn.1001-3997.2017.12.063 |
|
HUANG Guancheng , CHEN Xindu . The research of compliant teachingon the end-effector of industrial robot[J]. Machinery Design and Manufacture, 2017, (12): 255- 257.
doi: 10.3969/j.issn.1001-3997.2017.12.063 |
|
| 11 | 柳洋.配电线路维护机器人运动规划与实验研究[D].南京:南京理工大学, 2017. |
| LIU Yang. Motion planning and experimental research on maintenance of distribution line robots[D]. Nanjing: Nanjing University of Science and Technology, 2017. | |
| 12 | 付宜利, 王树国, 马玉林, 等. 机器人通用运动学自动建模技术[J]. 哈尔滨工业大学学报, 1995, (4): 115- 120. |
| FU Yili , WANG Shuguo , MA Yulin , et al. The technique of automatieally buiding kinematie model for robots[J]. Journal of Harbin Institute of Technology, 1995, (4): 115- 120. | |
| 13 | 高添泉.机械臂力/位置控制问题研究[D].沈阳:沈阳建筑大学, 2016. |
| GAO Tianquan. Research on force/position control of robot manipulator[D]. Shenyang: Shenyang University of Architecture, 2016. | |
| 14 |
姚智慧, 张付祥, 陈华. 新型力解耦机器人六维力传感器研究[J]. 哈尔滨工业大学学报, 2004, 36 (2): 160- 162.
doi: 10.3321/j.issn:0367-6234.2004.02.008 |
|
YAO Zhihui , ZHANG Fuxiang , CHEN Hua . Novel deeoupled six-axis for robot sensor[J]. Journal of Harbin Institute of Technology, 2004, 36 (2): 160- 162.
doi: 10.3321/j.issn:0367-6234.2004.02.008 |
|
| 15 | 张立建, 胡瑞钦, 易旺民. 基于六维力传感器的工业机器人末端负载受力感知研究[J]. 自动化学报, 2017, 43 (3): 439- 447. |
| ZHANG Lijian , HU Ruiqin , YI Wangmin . Research on force sensing for the end-load of industrial robot based on a 6-axis force/torque sensor[J]. Acta Automatica Sinica, 2017, 43 (3): 439- 447. | |
| 16 | 李军, 聂红, 熊琪, 等. 一种新型的六维力传感器静态标定系统设计研究[J]. 机械设计与制造, 2016, (5): 68- 70. |
| LI Jun , Nie Hong , XIONG Qi , et al. Research on the design of static calibration system for six-axis force sensor[J]. Mechinery Design and Manufacture, 2016, (5): 68- 70. | |
| 17 |
张晓辉. 机器人六维力传感器静态标定研究[J]. 自动化与仪表, 2004, (3): 88- 90.
doi: 10.3969/j.issn.1001-9944.2004.03.026 |
|
ZHANG Xiaohui . Research on static calibration of robot six axis force sensor[J]. Automation and Instrumentation, 2004, (3): 88- 90.
doi: 10.3969/j.issn.1001-9944.2004.03.026 |
|
| 18 | 赵敏.装配机器人作业过程控制系统应用与软件开发[D].南京:东南大学, 2016 |
| ZHAO Min. Application and software development of process control system for assembly robot[D]. Nanjing: Southeast University, 2016. | |
| 19 |
吴航, 马旭东, 钱堃. 基于实时力控制的装配机器人系统开发[J]. 工业控制计算机, 2017, 30 (1): 44- 46.
doi: 10.3969/j.issn.1001-182X.2017.01.020 |
|
WU Hang , MA Xudong , QIAN Hao . Development of robot assembly system based on Real-time force control[J]. Industrial Control Computer, 2017, 30 (1): 44- 46.
doi: 10.3969/j.issn.1001-182X.2017.01.020 |
|
| 20 |
张锟, 韦庆, 常文森. 一种基于力/位混合控制进行插孔作业的策略[J]. 机器人, 2002, (1): 44- 48.
doi: 10.3321/j.issn:1002-0446.2002.01.010 |
|
ZHANG Wei , Wei Qing , Chang Wensen . An insertion strategy based on force/position hybrid control[J]. Robot, 2002, (1): 44- 48.
doi: 10.3321/j.issn:1002-0446.2002.01.010 |
| [1] | 张强. 核环境多关节蛇形机械臂的运动控制系统设计[J]. 山东大学学报 (工学版), 2018, 48(6): 122-131. |
| [2] | 刘哲,宋锐,邹涛. 基于模型预测控制的磨削机器人末端力跟踪控制算法[J]. 山东大学学报(工学版), 2018, 48(1): 42-49. |
| [3] | 王秀青,曾慧,解飞,吕峰. 基于Spiking神经网络的机械臂故障诊断[J]. 山东大学学报(工学版), 2017, 47(5): 15-21. |
| [4] | 杨元慧,李国栋,吴春富,王小龙,蔡小伟. 移动机械臂手眼关系标定及视觉伺服控制方法[J]. 山东大学学报(工学版), 2016, 46(5): 54-63. |
| [5] | 高焕兵, 田国会. 面向配电系统的带电抢修作业机器人[J]. 山东大学学报(工学版), 2015, 45(1): 45-53. |
| [6] | 于奎刚1,2,杨志宏1,2*. 基于柔性装配偏差模型的汽车车身薄板零件公差设计[J]. 山东大学学报(工学版), 2014, 44(3): 69-74. |
| [7] | 杨奇彪 杨志宏 刘长安 付涛. 基于面接触特性的装配方向的自动识别和提取[J]. 山东大学学报(工学版), 2010, 40(1): 73-77. |
| [8] | 陈成军,周以齐,杨红娟 . 基于SolidWorks模型的虚拟装配模型转换和表达方法[J]. 山东大学学报(工学版), 2008, 38(1): 61-65 . |
|