山东大学学报 (工学版) ›› 2021, Vol. 51 ›› Issue (6): 84-92.doi: 10.6040/j.issn.1672-3961.0.2021.353
• 土木工程 • 上一篇
闵海根1,2( ),方煜坤1,*(),吴霞1,2,王武祺1
),方煜坤1,*(),吴霞1,2,王武祺1
Haigen MIN1,2(),Yukun FANG1,*(),Xia WU1,2,Wuqi WANG1
摘要:
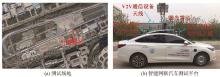
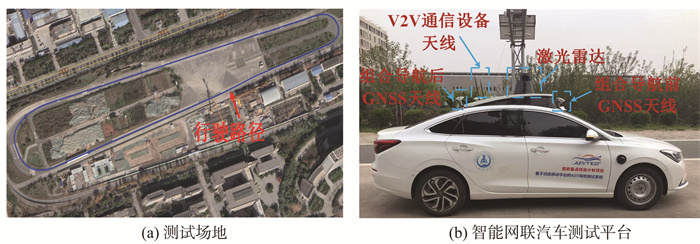
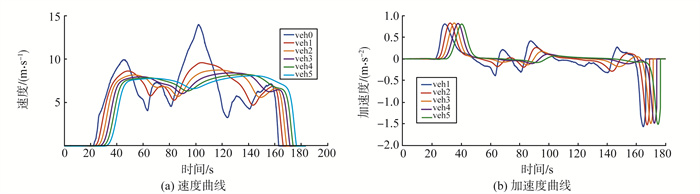
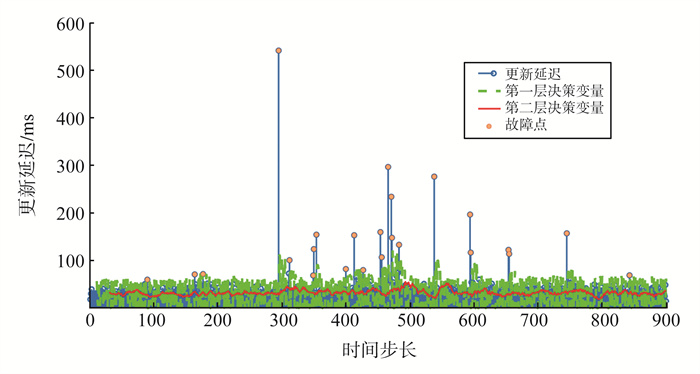
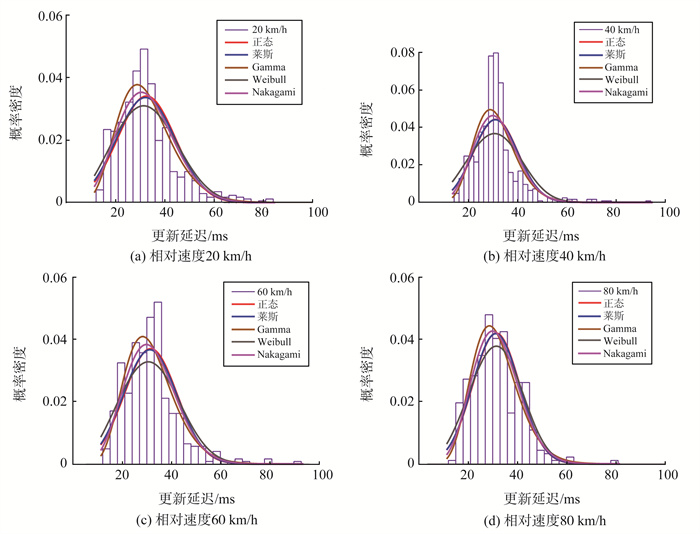
以智慧交通场景中的车辆编队为应用背景, 建立基于智能驾驶员模型的车辆队列控制模型, 分析车-车通信中延时对队列控制稳定性的影响。提出基于车-车通信更新延迟的故障诊断方法, 利用中值和均值的统计特性计算用于判断是否发生故障的决策变量, 设计两层滑窗对决策变量进行平滑, 实现决策变量实时、自适应计算; 利用Jarque-Bera检验一段时间内接收端延迟更新统计分布的正态性, 若该分布显著偏离正态分布, 则认为通信质量恶化。在测试场地采集车辆行驶速度数据和车-车通信延时数据, 对不同场景下车-车通信更新延迟的统计分布特性进行仿真试验, 验证车-车通信中延时对智能网联汽车协同控制的影响。研究结果表明, 车-车通信延时会导致协同控制过程中控制率的剧烈变化, 基于更新延迟的通信故障诊断方法可以对车-车通信质量是否恶化进行有效诊断。
中图分类号:
| 1 |
LI Li , WEN Ding , YAO Danya . A survey of traffic control with vehicular communications[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15 (1): 425- 432.
doi: 10.1109/TITS.2013.2277737 |
| 2 | 宋家成. 自主车辆队列分布式自适应控制研究[D]. 西安: 长安大学控制科学与工程系, 2018. |
| SONG Jiacheng. Study on distributed adaptive control of vehicle platoon[D]. Xi'an: Department of Control Science and Engineering, Chang'an University, 2018. | |
| 3 | 李科志. 车联网环境下基于反馈的智能车辆编队控制研究[D]. 重庆: 重庆邮电大学控制科学与工程系, 2017. |
| LI Kezhi. Feedback-based formation control for autonomous vehicles under connected environment[D]. Chongqing: Department of Control Science and Engineering, Chongqing University of Posts and Telecommunications, 2017. | |
| 4 |
ZHOU Bo , LIAO Xiaofeng . Leader-following second-order consensus in multi-agent systems with sampled data via pinning control[J]. Nonlinear Dynamics, 2014, 78 (1): 555- 569.
doi: 10.1007/s11071-014-1460-8 |
| 5 | GU Haiyan , ZHANG Jian , JIN Jing , et al. Stability analysis of lead-vehicle control model in cooperative adaptive cruise control platoon within heterogeneous traffic flow[J]. Journal of Southeast University (English Edition), 2018, 34 (3): 386- 393. |
| 6 |
GONG Siyuan , DU Lili . Cooperative platoon control for a mixed traffic flow including human drive vehicles and connected and autonomous vehicles[J]. Transportation Research Part B: Methodological, 2018, 116, 25- 61.
doi: 10.1016/j.trb.2018.07.005 |
| 7 | PERRAKI G , RONCOLI C , PAPAMICHAIL I , et al. Evaluation of a model predictive control framework for motorway traffic involving conventional and automated vehicles[J]. Transportation Research Part C: Emerging Technologies, 2018, 92 (7): 456- 471. |
| 8 | 徐成. 部分车辆联网条件下多车协同避障算法研究[D]. 北京: 清华大学机械工程系, 2015. |
| XU Cheng. Coordinated collision avoidance in partial-connected driving environment[D]. Beijing: Department of Mechanical Engineering, Tsinghua University, 2015. | |
| 9 |
LIU Bingyi , JIA Dongyao , LU Kejie , et al. A joint control-communication design for reliable vehicle platooning in hybrid traffic[J]. IEEE Transactions on Vehicular Technology, 2017, 66 (10): 9394- 9409.
doi: 10.1109/TVT.2017.2702650 |
| 10 |
BISWAS S , TATCHIKOU R , DION F . Vehicle-to-vehicle wireless communication protocols for enhancing highway traffic safety[J]. IEEE Communications Magazine, 2006, 44 (1): 74- 82.
doi: 10.1109/MCOM.2006.1580935 |
| 11 |
HU Sangen , WEN Huiying , XU Lunhui , et al. Stability of platoon of adaptive cruise control vehicles with time delay[J]. Transportation Letters, 2019, 11 (9): 506- 515.
doi: 10.1080/19427867.2017.1407488 |
| 12 |
WANG Meng . Infrastructure assisted adaptive driving to stabilise heterogeneous vehicle strings[J]. Transportation Research Part C Emerging Technologies, 2018, 91, 276- 295.
doi: 10.1016/j.trc.2018.04.010 |
| 13 | PROTZMANN R. V2X communication in heterogeneous networks[D]. Berlin: Department of Electronic and Information Engineering, Technische Universität Berlin, 2018. |
| 14 | WANG Ziran . Motion estimation of connected and automated vehicles under communication delay and packet loss of V2X communications[J]. SAE Technical Paper, 2021, 4, 1- 10. |
| 15 | SHUI Yishui , FANG Li , YU Junyi , et al. Vehicle-to-vehicle radio channel characteristics for congestion scenario in dense urban region at 5.9 GHz[J]. International Journal of Antennas and Propagation, 2018, 2018, 1- 14. |
| 16 | NI Yuanzhi, HE Jianping, CAI Lin, et al. Delay analysis and message delivery strategy in hybrid V2I/V2V networks[C]// Proceedings of GLOBECOM 2016-2016 IEEE Global Communications Conference. Washington, USA: IEEE, 2016: 1-6. |
| 17 | PAVLOVIT D , SEKULOVIC N , MILOVANOVIC G , et al. Statistics for ratios of Rayleigh, Rician, Nakagami-m, and Weibull distributed random variables[J]. Mathematical Problems in Engineering, 2013, 2013, 657- 675. |
| 18 | CAO Liu, YIN Hao, HU Jie, et al. Performance analysis and improvement on DSRC application for V2V communication[C]//2020 IEEE 92nd Vehicular Technology Conference. Victoria, Canada: IEEE, 2020: 1-6. . |
| 19 | VIVEK N, SRIKANTH S V, SAURABH P, et al. On field performance analysis of IEEE 802.11p and WAVE protocol stack for V2V & V2I communication[C]//Proceedings of International Conference on Information Communication and Embedded Systems (ICICES2014). Chennai, India: IEEE, 2014: 1-6. |
| 20 | 付留杰. 多智能体系统的故障诊断与容错控制方法研究[D]. 长春: 长春工业大学控制科学与工程系, 2017. |
| FULiujie. Research on fault diagnosis and fault-tolerant control of multi-agent system[D]. Changchun: Department of Control Science and Engineering, Changchun University of Technology, 2017. | |
| 21 | ZHOU Mofan , QU Xiaobo , JIN Sheng . On the impact of cooperative autonomous vehicles in improving freeway merging: a modified intelligent driver model-based approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18 (6): 1422- 1428. |
| 22 | TORABI H , HEDESH N M , GRANE A . A test for normality based on the empirical distribution function[J]. Statistics and Operations Research Transactions, 2016, 40 (1): 55- 88. |
| 23 |
BERA J . A test for normality of observations and regression residuals[J]. International Statistical Review, 1987, 55 (2): 163- 172.
doi: 10.2307/1403192 |
| [1] | 翟东海1,2,鱼江1,聂洪玉1,崔静静1,杜佳1. 基于相关性反馈的自适应热点话题追踪模型[J]. 山东大学学报(工学版), 2014, 44(1): 7-12. |
| [2] | 刘成云 陈振学 常发亮. 基于平稳小波的自适应阈值MR图像去噪法[J]. 山东大学学报(工学版), 2009, 39(5): 58-61. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 508
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 1005
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Cited |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
| Shared | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Discussed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
||