山东大学学报 (工学版) ›› 2019, Vol. 49 ›› Issue (5): 98-104.doi: 10.6040/j.issn.1672-3961.0.2018.348
万鹏( )
)
Peng WAN()
摘要:
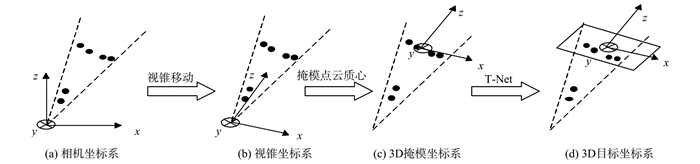
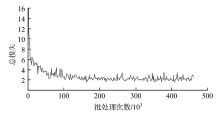
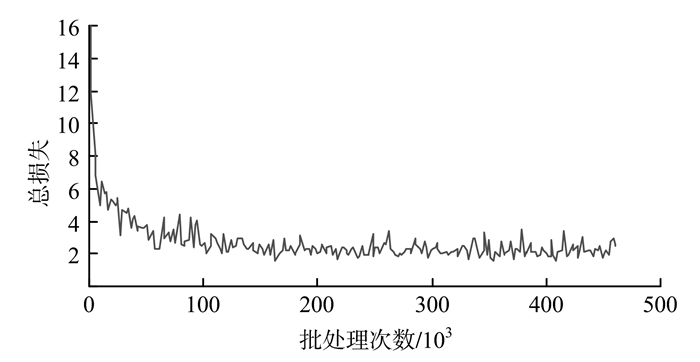
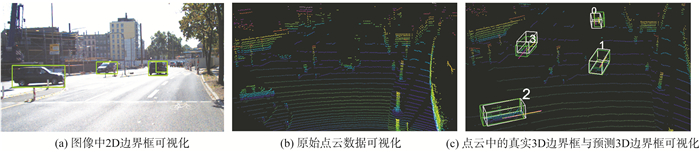
针对目前3D点云目标检测模型检测精度不高的问题,研究使用直接处理点云数据的F-PointNet模型检测汽车、行人和骑车人,并对模型进行微调,进一步提升模型的目标检测精度。试验中使用不同的参数初始化、
中图分类号:
| 1 | 薛瑞.基于RGB-D数据的点云配准[D].西安:长安大学, 2017. |
| XUE Rui. Point cloud registration based on RGB-D data[D]. Xi'an: Chang'an University, 2017. | |
| 2 | 赵熙.基于地面激光扫描面点云数据的三维重建方法研究[D].武汉:武汉大学, 2010. |
| ZHAO Xi. Research on 3D reconstruction method based on surface laser scanning point cloud data[D]. Wuhan: Wuhan University, 2010. | |
| 3 | MATURAN D, SCHERER S. VoxNet: a 3D convolutional neural network for real-time object recognition[C]//2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Hamburg, Germany: IEEE Press, 2015: 922-928. |
| 4 | WU Z, SONG S, KHOSLA A, et al. 3d shapenets: a deep representation for volumetric shapes[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Boston, USA: IEEE Press, 2015: 1912-1920. |
| 5 | LI B. 3D fully convolutional network for vehicle detection in point cloud[C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Vancouver, Canada: IEEE Press, 2017: 1513-1518. |
| 6 | WANG D Z, POSNER I, WANG D Z, et al. Voting for voting in online point cloud object detection[C]//Robotics: Science and Systems. Rome, Italy: IEEE Press, 2015: 1317-1325. |
| 7 | ENGELCKE M , RAO D , WANG D Z , et al. Vote3Deep: fast object detection in 3D point clouds using efficient convolutional neural networks[J]. ICRA, 2016, 1609, 1355- 1361. |
| 8 | LONG J , SHELHAMER E , DARRELL T . Fully convolutional networks for semantic segmentation[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2017, 39 (4): 640- 651. |
| 9 | QI C R, SU H, NIWBNER M, et al. Volumetric and multi-view cnns for object classification on 3d data[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, USA: IEEE Press, 2016: 5648-5656. |
| 10 | SU H, MAJI S, KALOGERAKIS E, et al. Multi-view convolutional neural networks for 3d shape recognition[C]//Proceedings of the IEEE International Conference on Computer Vision. Santiago, Chile: IEEE Press, 2015: 945-953. |
| 11 | LI B, ZHANG T, XIA T. Vehicle detection from 3D lidar using fully convolutional network[C]//Robotics: Science and System. Ann Arbor, USA: IEEE Press, 2016: 1608-1616. |
| 12 | CHEN X , MA H , WAN J , et al. Multi-view 3D object detection network for autonomous driving[J]. Computer Vision and Pattern Recognition(CVPR), 2016, (10): 6526- 6534. |
| 13 |
GONZALEZ A , VAZQUEZ D , LOPEZ A M , et al. On-board object detection: Multicue, multimodal, and multiview random forest of local experts[J]. IEEE Transactions on Cybernetics, 2017, 47 (11): 3980- 3990.
doi: 10.1109/TCYB.2016.2593940 |
| 14 |
ENZWEILER M , GAVRILA D M . A multilevel mixture-of-experts framework for pedestrian classification[J]. Image Processing IEEE Transactions, 2011, 20 (10): 2967- 2979.
doi: 10.1109/TIP.2011.2142006 |
| 15 | QI C R, LIU W, WU C, et al. Frustum pointnets for 3d object detection from rgb-d data[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Salt Lake City, USA: IEEE Press, 2018: 918-927. |
| 16 | CHARLES R Q, SU H, MO K, et al. Pointnet: Deep learning on point sets for 3d classification and segmentation[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, USA: IEEE Press, 2017: 652-660. |
| 17 | GEIGER A, LENZ P, URTASUN R. Are we ready for autonomous driving: the KITTI vision benchmark suite[C]//IEEE Conference on Computer Vision and Pattern Recognition. Providence, USA: IEEE Computer Society, 2012: 3354-3361. |
| 18 |
GEIGER A , LENZ P , STILLER C , et al. Vision meets robotics: the KITTI dataset[J]. International Journal of Robotics Research, 2013, 32 (11): 1231- 1237.
doi: 10.1177/0278364913491297 |
| 19 | ZHOU Y, TUZEL O. Voxelnet: end-to-end learning for point cloud based 3d object detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Salt Lake City, USA: IEEE Press, 2018: 4490-4499. |
| 20 | KU J, MOZIFIAN M, LEE J, et al. Joint 3d proposal generation and object detection from view aggregation[C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid, Spain: IEEE Press, 2018: 1-8. |
| [1] | 梁志祥,刘晓明,牟颖,刘玉田. 基于深度学习的新能源爬坡事件预测方法[J]. 山东大学学报 (工学版), 2019, 49(5): 24-28. |
| [2] | 刘玉田,孙润稼,王洪涛,顾雪平. 人工智能在电力系统恢复中的应用综述[J]. 山东大学学报 (工学版), 2019, 49(5): 1-8. |
| [3] | 张继,金翠,王洪元,陈首兵. 基于奇异值分解行人对齐网络的行人重识别[J]. 山东大学学报 (工学版), 2019, 49(5): 91-97. |
| [4] | 李力钊,蔡国永,潘角. 基于C-GRU的微博谣言事件检测方法[J]. 山东大学学报 (工学版), 2019, 49(2): 102-106, 115. |
| [5] | 侯霄雄,许新征,朱炯,郭燕燕. 基于AlexNet和集成分类器的乳腺癌计算机辅助诊断方法[J]. 山东大学学报 (工学版), 2019, 49(2): 74-79. |
| [6] | 张成彬,赵慧,曹宗钰. 基于深度学习的车身网络KWP2000协议漏洞挖掘[J]. 山东大学学报 (工学版), 2019, 49(2): 17-22. |
| [7] | 谢志峰,吴佳萍,马利庄. 基于卷积神经网络的中文财经新闻分类方法[J]. 山东大学学报(工学版), 2018, 48(3): 34-39. |
| [8] | 唐乐爽,田国会,黄彬. 一种基于DSmT推理的物品融合识别算法[J]. 山东大学学报(工学版), 2018, 48(1): 50-56. |
| [9] | 周福娜,高育林,王佳瑜,文成林. 基于深度学习的缓变故障早期诊断及寿命预测[J]. 山东大学学报(工学版), 2017, 47(5): 30-37. |
| [10] | 惠开发,成科扬,詹永照. 基于改进ViBe算法的视频浓缩[J]. 山东大学学报(工学版), 2017, 47(3): 43-48. |
| [11] | 刘英霞,王希常,唐晓丽,常发亮. 基于小波域特征和贝叶斯估计的目标检测算法[J]. 山东大学学报(工学版), 2017, 47(2): 63-70. |
| [12] | 何正义,曾宪华,曲省卫,吴治龙. 基于集成深度学习的时间序列预测模型[J]. 山东大学学报(工学版), 2016, 46(6): 40-47. |
| [13] | 郑毅, 朱成璋. 基于深度信念网络的PM2.5预测[J]. 山东大学学报(工学版), 2014, 44(6): 19-25. |
| [14] | 杨健梅1,黄添强1,2*,江伟坚1. 基于人脸色温的拼接图像篡改检测[J]. 山东大学学报(工学版), 2013, 43(5): 24-30. |
| [15] | 王秀芬,王汇源,王松. 基于背景差分法和显著性图的海底目标检测方法[J]. 山东大学学报(工学版), 2011, 41(1): 12-16. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 1221
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 3460
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Cited |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
| Shared | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Discussed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|