山东大学学报 (工学版) ›› 2020, Vol. 50 ›› Issue (2): 27-33.doi: 10.6040/j.issn.1672-3961.0.2019.412
宋士奇( ),朴燕*(),蒋泽新
),朴燕*(),蒋泽新
Shiqi SONG(),Yan PIAO*(),Zexin JIANG
摘要:
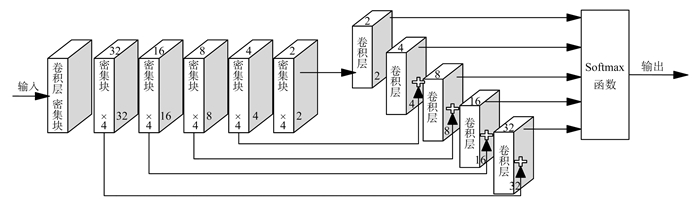
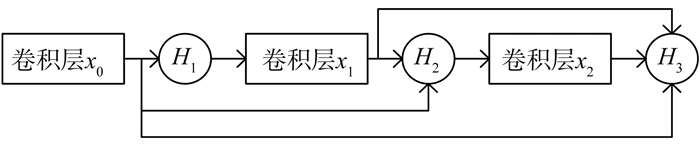
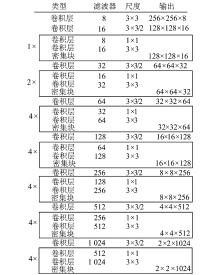
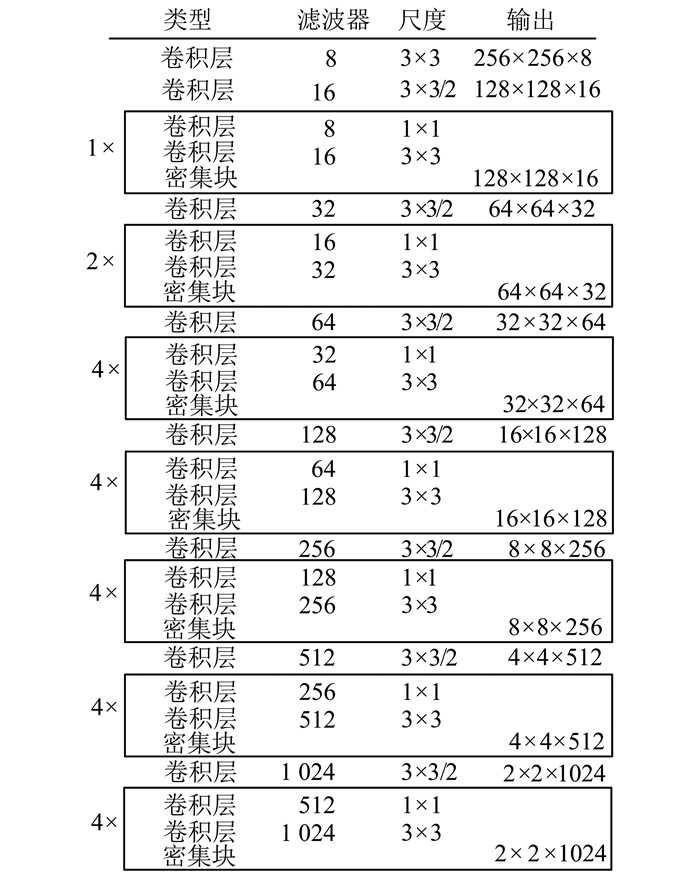
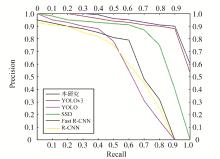
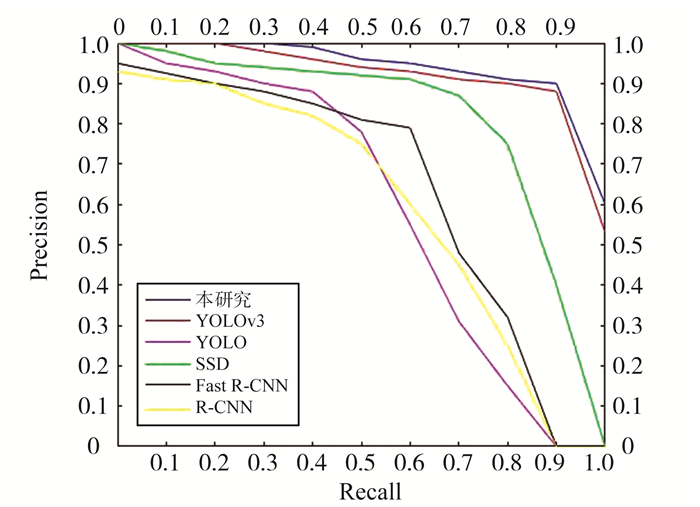
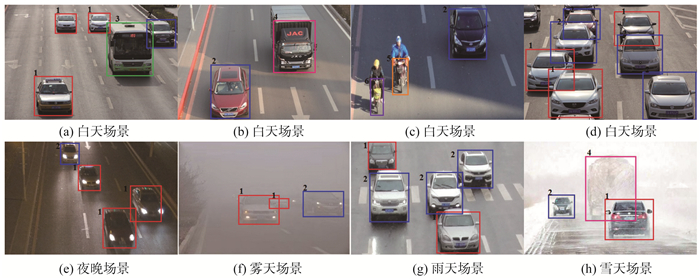
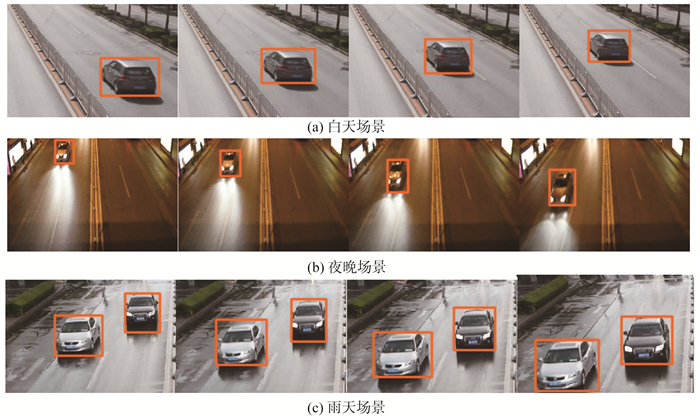
针对天气条件和车辆间相互遮挡对车辆分类与跟踪准确性和稳定性的影响,提出一种基于改进YOLOv3与匹配跟踪的混合模型。改进的YOLOv3网络参照密集连接卷积网络的设计思想,将网络中的残差层替换为密集卷积块并改变网络的设计结构,利用Softmax分类器将密集卷积块与卷积层中融合的特征进行分类。根据单帧图像的检测结果,设计目标匹配函数解决视频序列中车辆的跟踪问题。在KITTI数据集的测试中,改进算法的平均准确率为93.01%,帧率达到48.98帧/s,在自建的数据集中平均识别率为95.79%。试验结果表明,本研究方法在复杂场景中能够有效的区分车辆种类且准确性更高,车辆跟踪的算法具有较高准确性和鲁棒性。
中图分类号:
| 1 |
赵娜, 袁家斌, 徐晗. 智能交通系统综述[J]. 计算机科学, 2014, 41 (11): 7- 11.
doi: 10.11896/j.issn.1002-137X.2014.11.002 |
|
ZHAO Na , YUAN Jiabin , XU Han . Overview of intelligent transportation systems[J]. Computer Science, 2014, 41 (11): 7- 11.
doi: 10.11896/j.issn.1002-137X.2014.11.002 |
|
| 2 |
DUANMU F , MA Z , WANG Y . Fast mode and partition decision using machine learning for intra-frame coding in HEVC screen content coding extension[J]. IEEE Journal on Emerging and Selected Topics in Circuits and Systems, 2016, 6 (4): 517- 531.
doi: 10.1109/JETCAS.2016.2597698 |
| 3 | SARIPAN K, NUTHONG C. Tree-based vehicle classification system[C]//2017 14th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON). Phuket, Thailand: IEEE, 2017: 439-442. |
| 4 | PUROHIT N, ISRANI D.Vehicle classification and surveillance using machine learning technique[C]//2017 2nd IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT). Bengaluru, India: IEEE, 2017: 910-914. |
| 5 |
KAFAI M , BHANU B . Dynamic Bayesian networks for vehicle classification in video[J]. IEEE Transactions on Industrial Informatics, 2012, 8 (1): 100- 109.
doi: 10.1109/TII.2011.2173203 |
| 6 | GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]//2014 IEEE Conference on Computer Vision and Pattern Recognition(CVPR). Columbus, USA: IEEE, 2014: 580-587. |
| 7 | REN S, HE K, Girshick R, et al. Faster R-cnn: towards real-time object detection with region proposal networks[C]//Advances in Neural Information Processing Systems. Quebec, Canada: Curran Associates Inc., 2015: 91-99. |
| 8 | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition(CVPR). Las Vegas, USA: IEEE, 2016: 779-788. |
| 9 | LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot multibox detector[C]//European Conference on Computer Vision. Amsterdam, Netherlands: Springer, 2016: 21-37. |
| 10 | REDMON J, FARHADI A. Yolov3: an incremental improvement[EB/OL].(2018-04-01) [2019-07-22]. https://www.bibsonomy.org/bibtex/bbdec3df168e9809-d9e61423d4b4e062.arXiv:1804.02767v1, 2018. |
| 11 | HUANG G, LIU Z, VAN Der Maaten L, et al. Densely connected convolutional networks[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition(CVPR). Hawaii, USA: IEEE, 2017: 4700-4708. |
| 12 | LIN T Y, DOLLAR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition(CVPR). Hawaii, USA: IEEE, 2017: 2117-2125. |
| 13 | GEIGER A, LENZ P, URTASUN R. Are we ready for autonomous driving? the kitti vision benchmark suite[C]//2012 IEEE Conference on Computer Vision and Pattern Recognition(CVPR). Rhode Island, USA: IEEE, 2012: 3354-3361. |
| 14 | KALAL Z, MATAS J, MIKOLAJCZYK K. Pn learning: Bootstrapping binary classifiers by structural constraints[C]//2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition(CVPR). California, USA: IEEE, 2010: 49-56. |
| 15 | WANG N, YEUNG D Y. Learning a deep compact image representation for visual tracking[C]//Advances in Neural Information Processing Systems. Lake Tahoe, USA: Curran Associates Inc, 2013: 809-817. |
| 16 | ZHONG W, LU H, YANG M H. Robust object tracking via sparsity-based collaborative model[C]//2012 IEEE Conference on Computer Vision and Pattern Recognition(CVPR). Rhode Island, USA: IEEE, 2012: 1838-1845. |
| [1] | 李春阳,李楠,冯涛,王朱贺,马靖凯. 基于深度学习的洗衣机异常音检测[J]. 山东大学学报 (工学版), 2020, 50(2): 108-117. |
| [2] | 蔡国永,林强,任凯琪. 基于域对抗网络和BERT的跨领域文本情感分析[J]. 山东大学学报 (工学版), 2020, 50(1): 1-7,20. |
| [3] | 赵越男,陈桂友,孙琛,卢宁,廖立伟. 基于空间隐患分布与运动意图解析的危险评估方法[J]. 山东大学学报 (工学版), 2020, 50(1): 28-34. |
| [4] | 侯霄雄,许新征,朱炯,郭燕燕. 基于AlexNet和集成分类器的乳腺癌计算机辅助诊断方法[J]. 山东大学学报 (工学版), 2019, 49(2): 74-79. |
| [5] | 权稳稳,林明星. CNN特征与BOF相融合的水下目标识别算法[J]. 山东大学学报 (工学版), 2019, 49(1): 107-113. |
| [6] | 梁蒙蒙,周涛,夏勇,张飞飞,杨健. 基于PSO-ConvK卷积神经网络的肺部肿瘤图像识别[J]. 山东大学学报 (工学版), 2018, 48(5): 77-84. |
| [7] | 张璞,刘畅,王永. 基于特征融合和集成学习的建议语句分类模型[J]. 山东大学学报 (工学版), 2018, 48(5): 47-54. |
| [8] | 张宪红,张春蕊. 基于六维前馈神经网络模型的图像增强算法[J]. 山东大学学报(工学版), 2018, 48(4): 10-19. |
| [9] | 何正义,曾宪华,郭姜. 一种集成卷积神经网络和深信网的步态识别与模拟方法[J]. 山东大学学报(工学版), 2018, 48(3): 88-95. |
| [10] | 谢志峰,吴佳萍,马利庄. 基于卷积神经网络的中文财经新闻分类方法[J]. 山东大学学报(工学版), 2018, 48(3): 34-39. |
| [11] | 赵彦霞, 王熙照. 基于SVD和DCNN的彩色图像多功能零水印算法[J]. 山东大学学报(工学版), 2018, 48(3): 25-33. |
| [12] | 孟令恒,丁世飞. 基于单静态图像的深度感知模型[J]. 山东大学学报(工学版), 2016, 46(3): 37-43. |
| [13] | 邱晓欣1,2,张文强1,2*,秦晋贤1,2,杜正阳1,2,张德峰1,2. 恶劣环境下多目标实时跟踪算法研究[J]. 山东大学学报(工学版), 2014, 44(2): 21-27. |
| [14] | 潘晟旻1,2,钟毅1*,王建华2. 基于改进Canny算子的坯料挤压变形边缘提取[J]. 山东大学学报(工学版), 2013, 43(5): 19-23. |
| [15] | 徐姗姗,刘应安*,徐昇. 基于卷积神经网络的木材缺陷识别[J]. 山东大学学报(工学版), 2013, 43(2): 23-28. |
|