山东大学学报 (工学版) ›› 2019, Vol. 49 ›› Issue (3): 47-56.doi: 10.6040/j.issn.1672-3961.0.2018.385
马川1,2( ),刘彦呈1,*(),刘厶源1,张勤进1
),刘彦呈1,*(),刘厶源1,张勤进1
Chuan MA1,2(),Yancheng LIU1,*(),Siyuan LIU1,Qinjin ZHANG1
摘要:
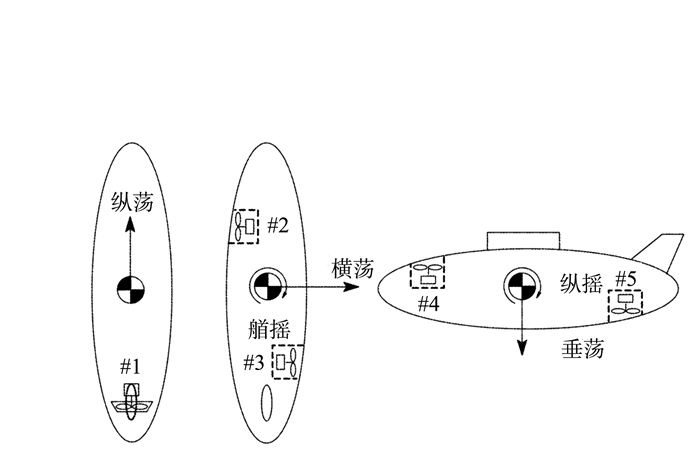
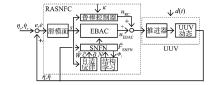
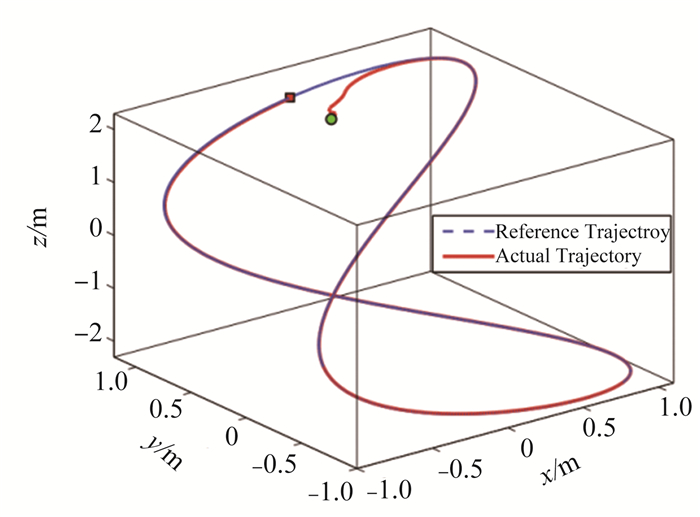
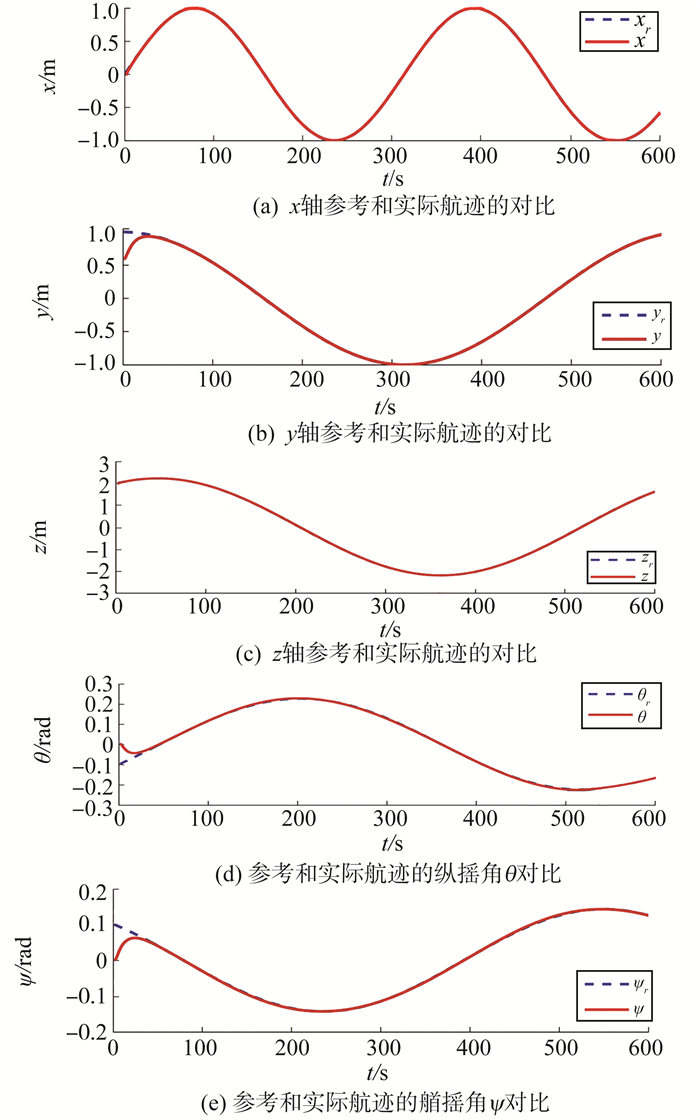
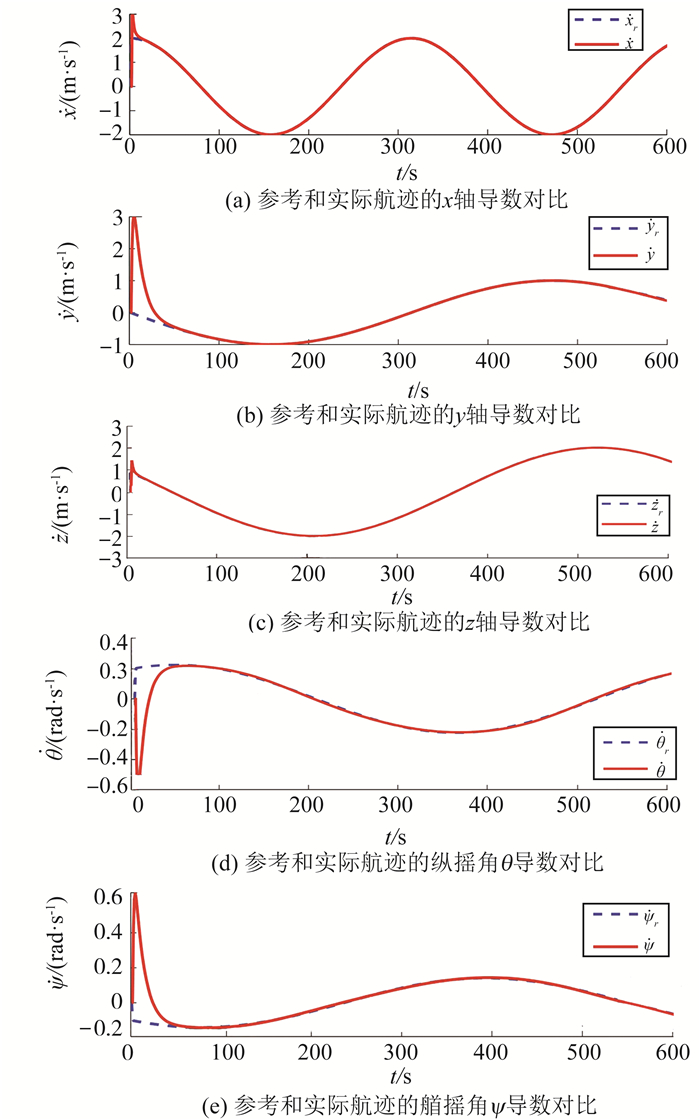
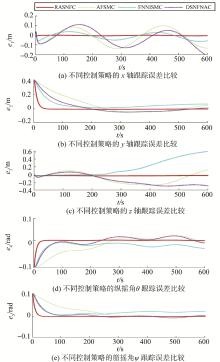
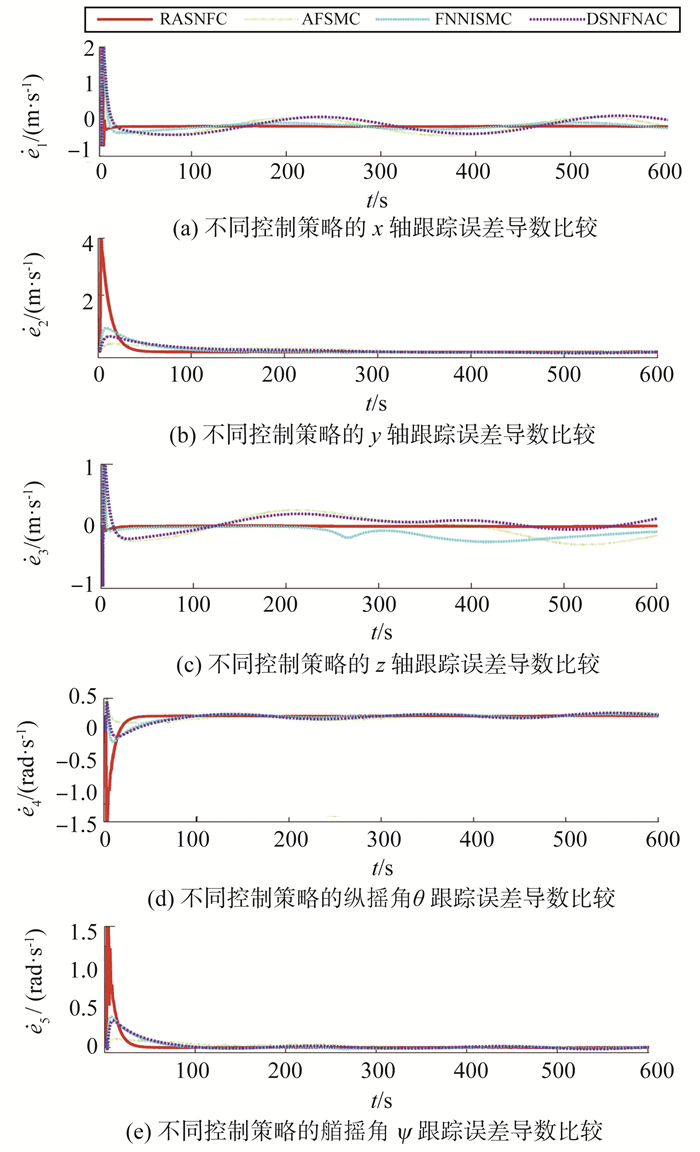
针对无人水下航行器(unmanned underwater vehicles, UUV)在航迹跟踪控制中存在未知死区非线性和工作环境不确定性的问题,提出一种鲁棒自适应自组织模糊神经控制策略,采用滑模趋近律控制框架和自组织模糊神经网络逼近器在线估计系统未知状态和进行参数的自适应,并采用有限增益鲁棒控制器补偿重构误差。根据李雅普诺夫稳定性理论分析证明所有参数和跟踪状态均有界,并且当时间趋向于无穷大时,跟踪误差及其导数都趋向于零且闭环系统的信号有界。通过与已有控制策略对比仿真表明,该控制策略具有先进性和有效性,对无人水下航行器设计具有指导意义。
中图分类号:
| 1 |
刘厶源, 刘彦呈, 付俞鑫, 等. 基于动态模糊神经趋近律的水下航行器航迹跟踪控制[J]. 大连海事大学学报, 2016, 42 (4): 1- 6.
doi: 10.3969/j.issn.1671-7031.2016.04.001 |
|
LIU Siyuan , LIU Yancheng , FU Yuxin , et al. Trajectory tracking control of underwater vehicles based on dynamic fuzzy neural network reaching law[J]. Journal of Dalian Maritime University, 2016, 42 (4): 1- 6.
doi: 10.3969/j.issn.1671-7031.2016.04.001 |
|
| 2 |
DAS B , SUBUDHI B , PATI B B . Cooperative formation control of autonomous underwater vehicles: an overview[J]. International Journal of Automation and Computing, 2016, 13 (3): 199- 225.
doi: 10.1007/s11633-016-1004-4 |
| 3 | CHEN B , LIU X P , TONG S C . Adaptive fuzzy output tracking control of MIMO nonlinear uncertain systems[J]. IEEE Transactions on Fuzzy Systems, 2007, 15 (2): 287- 300. |
| 4 |
KAYACAN E , RAMON H , SAEYS W . Adaptive neuro-fuzzy control of a spherical rolling robot using sliding mode control theory based online learning algorithm[J]. IEEE Transactions on Cybernetics, 2013, 43 (1): 170- 179.
doi: 10.1109/TSMCB.2012.2202900 |
| 5 |
WANG W Y , CHIEN Y H , LEU Y G . Adaptive T-S fuzzy-neural modeling and control for general MIMO unknown nonaffine nonlinear systems using projection update laws[J]. Automatica, 2010, 46 (5): 852- 863.
doi: 10.1016/j.automatica.2010.02.024 |
| 6 |
HASSANEIN O , ANAVATTI S G , SHIM H . Model-based adaptive control system for autonomous underwater vehicles[J]. Ocean Engineering, 2016, 127, 58- 69.
doi: 10.1016/j.oceaneng.2016.09.034 |
| 7 | CHANG Y H , CHAN W S , CHANG C W , et al. Adaptive fuzzy dynamic surface control for ball and beam system[J]. International Journal of Fuzzy Systems, 2011, 13 (1): 1- 7. |
| 8 |
CHEN C S . Dynamic structure neural-fuzzy networks for robust adaptive control of robot manipulators[J]. IEEE Transactions on Industrial Electronics, 2008, 55 (9): 3402- 3414.
doi: 10.1109/TIE.2008.926778 |
| 9 | ZHOU J , WEN C , ZHANG Y . Adaptive output control of non-linear systems with uncertain dead-zone nonlinearity[J]. IEEE Transactions on Automatic Control, 2006, 11 (2): 504- 511. |
| 10 |
LIU Y J , TONG S C , WANG D . Adaptive neural output feedback controller design with reducedorder observer for a class of uncertain nonlinear SISO systems[J]. IEEE Transactions on Neural Networks and Learning Systems, 2011, 22 (8): 1328- 1334.
doi: 10.1109/TNN.2011.2159865 |
| 11 |
LEWIS F , TIM W K , WANG L Z . Dead-zone compensation in motion control systems using adaptive fuzzy logic control[J]. IEEE Transactions on Control System Technology, 1999, 7 (6): 731- 742.
doi: 10.1109/87.799674 |
| 12 | LI Y , TONG S , LI T . Observer-based adaptive fuzzy tracking control of MIMO stochastic nonlinear systems with unknown control direction and unknown dead-zones[J]. IEEE Transactions on Fuzzy Systems, 2015, 23 (4): 1228- 1241. |
| 13 | LI Y , TONG S , LIU Y , LI T . Adaptive fuzzy robust output feedback control of nonlinear systems with unknown dead zones based on small-gain approach[J]. IEEE Transactions on Fuzzy Systems, 2014, 22 (1): 164- 176. |
| 14 | TONG S , LI Y . Adaptive fuzzy output feedback tracking backstepping control of strict-feedback nonlinear systems with unknown dead zones[J]. IEEE Transactions on Fuzzy Systems, 2012, 20 (1): 168- 180. |
| 15 | WANG N , QIAN C J , SUN J C , et al. Adaptive robust finite-time trajectory tracking control of fully actuated marine surface vehicles[J]. IEEE Transactions on Control System Technology, 2016, 24 (4): 1454- 1462. |
| 16 |
WANG N , SUN J C , ER M J , et al. Adaptive robust online constructive fuzzy control of a complex surface vehicle system[J]. IEEE Transactions on Cybernetics, 2016, 46 (7): 1511- 1523.
doi: 10.1109/TCYB.2015.2451116 |
| 17 | 高剑. 无人水下航行器自适应非线性控制技术[M]. 西安: 西北工业大学出版社, 2016: 15- 32. |
| 18 |
赵蕊, 余琨, 郑文成, 等. 无人水下航行器分布式运动控制系统设计与仿真验证[J]. 中国舰船研究, 2014, 9 (6): 92- 99.
doi: 10.3969/j.issn.1673-3185.2014.06.016 |
|
ZHAO Rui , YU Kun , ZHENG Wencheng , et al. Design and simulation of the distributive motion control system for unmanned underwater vehicles[J]. Chinese Journal of Ship Research, 2014, 9 (6): 92- 99.
doi: 10.3969/j.issn.1673-3185.2014.06.016 |
|
| 19 | LIU Y C , LIU S Y , WANG N . Fully-tuned fuzzy neural network based robust adaptive tracking control of unmanned underwater vehicle with thruster dynamics[J]. Neuro Computing, 2016, 196, 1- 13. |
| 20 | FOSSEN T I . Marine control systems: guidance, navigation and control of ships rigs and underwater vehicles[M]. Trondheim, Norway: Marine Cybernetics AS, 2002: 1- 50. |
| 21 |
JANG J O . A deadzone compensator of a DC motor system using fuzzy logic control[J]. IEEE Transactions on Systems Man and Cybernetics Applications and Reviews, 2001, 31 (1): 42- 48.
doi: 10.1109/5326.923267 |
| 22 | GAO W , HUNG J C . Variable structure control of nonlinear systems: a new approach[J]. IEEE Transactions on Industrial Electronics, 1993, 40 (1): 45- 55. |
| 23 | ZHANG L J , QI X , PANG Y J . Adaptive output feedback control based on DRFNN for AUV[J]. Ocean Engineering, 2009, 36 (10): 716- 722. |
| 24 | CHEN B S , LEE C H . H∞tracking design of uncertain non-linear SISO systems: adaptive fuzzy approach[J]. IEEE Transactions on Fuzzy Systems, 1996, 4 (1): 32- 43. |
| 25 | WANG N , ER M J . Self-constructing adaptive robust fuzzy neural tracking control of surface vehicles with uncertainties and unknown disturbances[J]. IEEE Transactions on Control System Technology, 2015, 23 (3): 991- 1002. |
| 26 | GAO Y , ER M J . Online adaptive fuzzy neural identification and control of a class of MIMO nonlinear systems[J]. IEEE Transactions on Fuzzy Systems, 2003, 11 (4): 462- 477. |
| 27 | WAI R J , MUTHUSAMY R . Fuzzy-neural-network inherited sliding-mode control for robot manipulator including actuator dynamics[J]. IEEE Transactions on Neural Networks and Learning Systems, 2013, 24 (2): 274- 287. |
| No related articles found! |
|