山东大学学报 (工学版) ›› 2021, Vol. 51 ›› Issue (1): 100-107.doi: 10.6040/j.issn.1672-3961.0.2020.247
肖浩1( ),廖祝华1,2,*(),刘毅志1,2,刘思林1,刘建勋1,2
),廖祝华1,2,*(),刘毅志1,2,刘思林1,刘建勋1,2
Hao XIAO1(),Zhuhua LIAO1,2,*(),Yizhi LIU1,2,Silin LIU1,Jianxun LIU1,2
摘要:
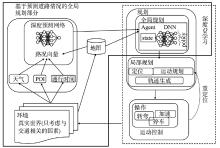
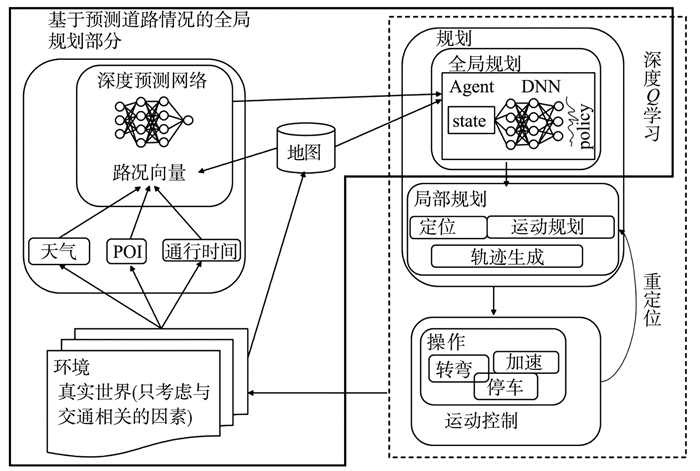
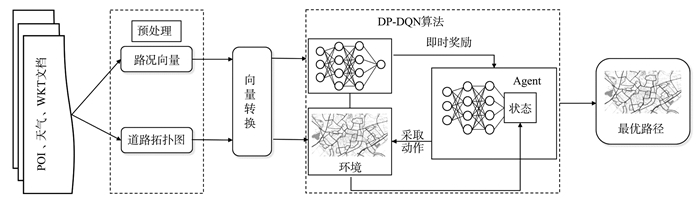
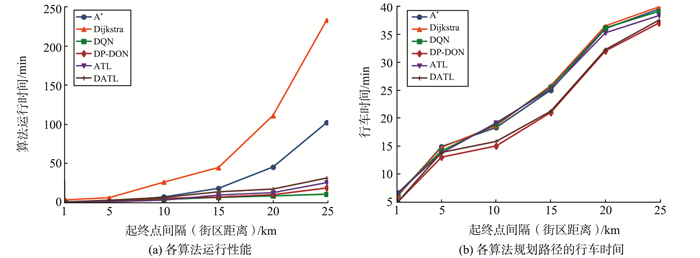
实际交通环境规划最优路径的重要问题是无人车智能导航, 而无人车全局路径规划研究主要在于模拟环境中算法求解速度的提升, 考虑大部分仅路径距离最优或局限于当前道路的自身状况, 本研究针对实际环境中的其他因素及其未来的变化和动态路网中无人车全局路径规划的复杂任务, 基于预测后再规划的思想提出面向实际环境的无人车驾驶系统框架, 并结合深度Q学习和深度预测网络技术提出一种快速全局路径规划方法(deep prediction network and deep Q network, DP-DQN), 从而利用时空、天气等道路特征数据来预测未来交通状况、求解全局最优路径。基于公开数据集的试验和评价后发现, 本研究提出的方法与Dijkstra、A*等算法相比, 行车时间最高降低了17.97%。
中图分类号:
| 1 | DIKMEN M, BURNS C M. Autonomous driving in the real world: Experiences with tesla autopilot and summon[C]//Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications. Ann Arbor MI, USA: ACM, 2016. |
| 2 |
PADEN B , CAP M , YONG S Z , et al. A survey of motion planning and control techniques for self-driving urban vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2016, 1 (1): 33- 55.
doi: 10.1109/TIV.2016.2578706 |
| 3 |
HART P E , NILSSON N J , RAPHAEL Bertram . A formal basis for the heuristic determination of minimum cost paths[J]. IEEE Transactions on Systems Science and Cybernetics, 1968, 4 (2): 100- 107.
doi: 10.1109/TSSC.1968.300136 |
| 4 |
DIJKSTRA E W . A note on two problems in connexion with graphs[J]. Numerische Mathematik, 1959, 1 (1): 269- 271.
doi: 10.1007/BF01386390 |
| 5 | NIEWOLA A , PODSEDKOWSKI L . L* algorithm: a linear computational complexity graph searching algorithm for path planning[J]. Journal of Intelligent & Robotic Systems, 2018, 91 (3-4): 425- 444. |
| 6 | GOLDBERG A V, HARRELSON C. Computing the shortest path: a search meets graph theory[C]//Proceedings of the Sixteenth Annual Acm-Siam Symp-osium on Discrete Algorithms. Vancouver, Canada: SIAM, 2005. |
| 7 |
PANOV A I , YAKOVLEV K S , SUVOROV R . Grid path planning with deep reinforcement learning: Preliminary results[J]. Procedia Computer Science, 2018, 123, 347- 353.
doi: 10.1016/j.procs.2018.01.054 |
| 8 | DED B, KHAN S R, HASSAN K T, et al. Travel time prediction using machine learning and weather impact on traffic conditions[C]//2019 IEEE 5th International Conference for Convergence in Technology (I2CT). Pune, India: IEEE, 2019. |
| 9 |
LIEBIG T , PIATKOWSKI N , BOCKERMANN C , et al. Dynamic route planning with real-time traffic predictions[J]. Information Systems, 2017, 64, 258- 265.
doi: 10.1016/j.is.2016.01.007 |
| 10 |
WAN J , LIU J , SHAO Z . Mobile crowd sensing for traffic prediction in internet of vehicles[J]. Sensors, 2016, 16 (1): 88.
doi: 10.3390/s16010088 |
| 11 | HE F, XU Y, WANG X, et al. ALT-based route planning in dynamic time-dependent road networks[C]//Proceedings of the 2019 2nd International Conference on Machine Learning and Machine Intelligence. Jakarta, Indonesia: ACM, 2019. |
| 12 |
DIAL R , GLOVER F , KARNEY D , et al. A computational analysis of alternative algorithms and labeling techniques for finding shortest path trees[J]. Networks, 1979, 9 (3): 215- 248.
doi: 10.1002/net.3230090304 |
| 13 |
TSO G K F , YAU K K W . Predicting electricity energy consumption: a comparison of regression analysis, decision tree and neural networks[J]. Energy, 2007, 32 (9): 1761- 1768.
doi: 10.1016/j.energy.2006.11.010 |
| [1] | 李晓辉,刘小飞,孙炜桐,赵毅,董媛,靳引利. 基于车辆与无人机协同的巡检任务分配与路径规划算法[J]. 山东大学学报 (工学版), 2025, 55(5): 101-109. |
| [2] | 赵红专,张鑫,张蓓聆,展新,李文勇,袁泉,王涛,周旦. 基于改进人工势场的智能车动态安全椭圆路径规划方法[J]. 山东大学学报 (工学版), 2025, 55(3): 46-57. |
| [3] | 韩毅,刘毅超,关甜,兰理文,汤宁业. 改进A*和动态窗口法的无人车路径规划[J]. 山东大学学报 (工学版), 2025, 55(3): 16-24. |
| [4] | 张飞凯,夏拥军,秦剑,游溢,彭飞. 基于A*算法的输电线路组塔施工吊装路径规划方法[J]. 山东大学学报 (工学版), 2024, 54(3): 141-148. |
| [5] | 黄健堃,薛钢,刘延俊,王雨,李厚池,白发刚. 基于改进Bi-RRT算法的机器鱼路径规划方法[J]. 山东大学学报 (工学版), 2024, 54(1): 74-82. |
| [6] | 赵天怀,王目树,潘为刚,康超,秦石铭,徐飞. 挖掘机智能辅助施工系统设计[J]. 山东大学学报 (工学版), 2023, 53(4): 163-172. |
| [7] | 张飞凯,黄永忠,李连茂,秦剑,刘晨. 基于Dijkstra算法的货运索道路径规划方法[J]. 山东大学学报 (工学版), 2022, 52(6): 176-182. |
| [8] | 王雨,刘延俊,贾华,薛钢. 基于强化RRT算法的机械臂路径规划[J]. 山东大学学报 (工学版), 2022, 52(6): 123-130. |
| [9] | 李彩虹,方春,王志强,夏斌,王凤英. 基于超混沌同步控制的移动机器人全覆盖路径规划[J]. 山东大学学报 (工学版), 2019, 49(6): 63-72. |
| [10] | 周风余, 万方, 焦建成, 边钧健. 家庭陪护机器人自主充电系统研究与设计[J]. 山东大学学报 (工学版), 2019, 49(1): 55-65. |
| [11] | 张强. 核环境多关节蛇形机械臂的运动控制系统设计[J]. 山东大学学报 (工学版), 2018, 48(6): 122-131. |
| [12] | 严宣辉, 肖国宝*. 基于定长实数路径编码机制的移动机器人路径规划[J]. 山东大学学报(工学版), 2012, 42(1): 59-65. |
| [13] | 刘彬,张仁津. 一种采用两段粒子群优化的路径规划方法[J]. 山东大学学报(工学版), 2012, 42(1): 12-18. |
| [14] | 陈明志1,许春耀2,陈健2,余轮2. 基于语义信息的虚拟环境路径规划[J]. 山东大学学报(工学版), 2011, 41(4): 106-112. |
|