山东大学学报 (工学版) ›› 2023, Vol. 53 ›› Issue (6): 143-151.doi: 10.6040/j.issn.1672-3961.0.2023.009
路勇良1,2( ),张伟3,赵军1,2,*(),张振3,张自健1,2
),张伟3,赵军1,2,*(),张振3,张自健1,2
Yongliang LU1,2(),Wei ZHANG3,Jun ZHAO1,2,*(),Zhen ZHANG3,Zijian ZHANG1,2
摘要:
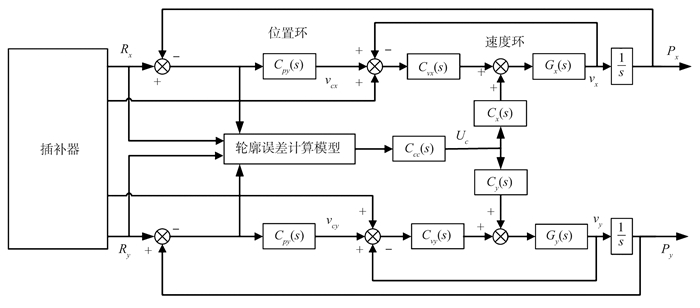
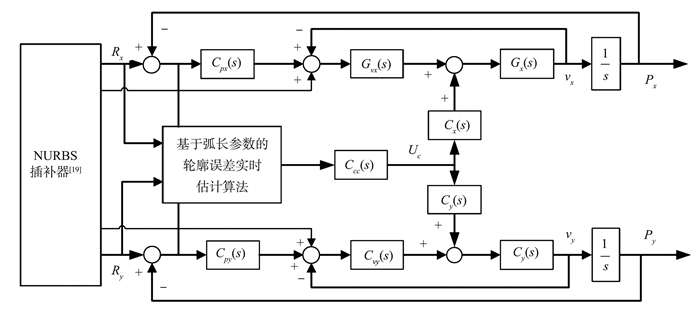
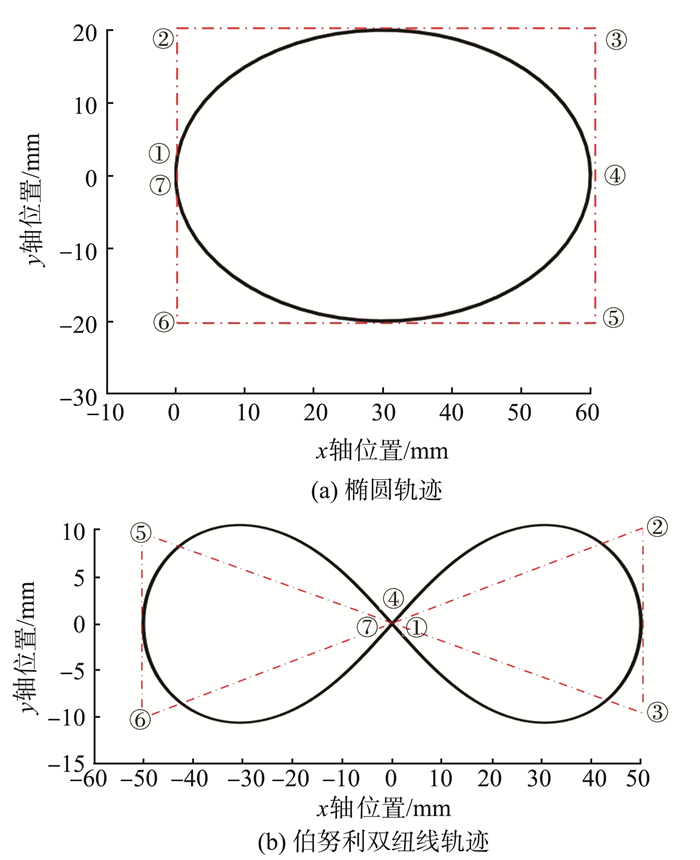
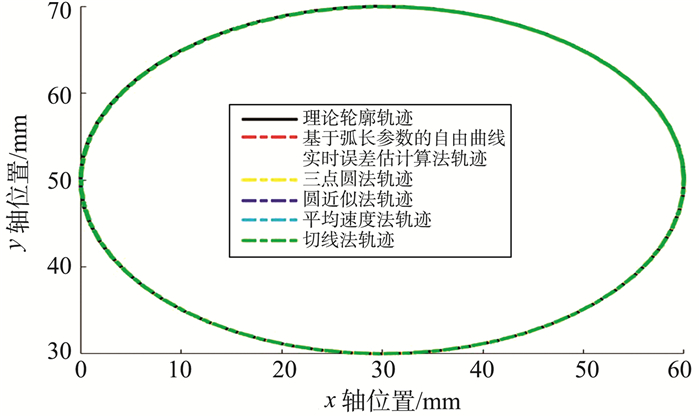
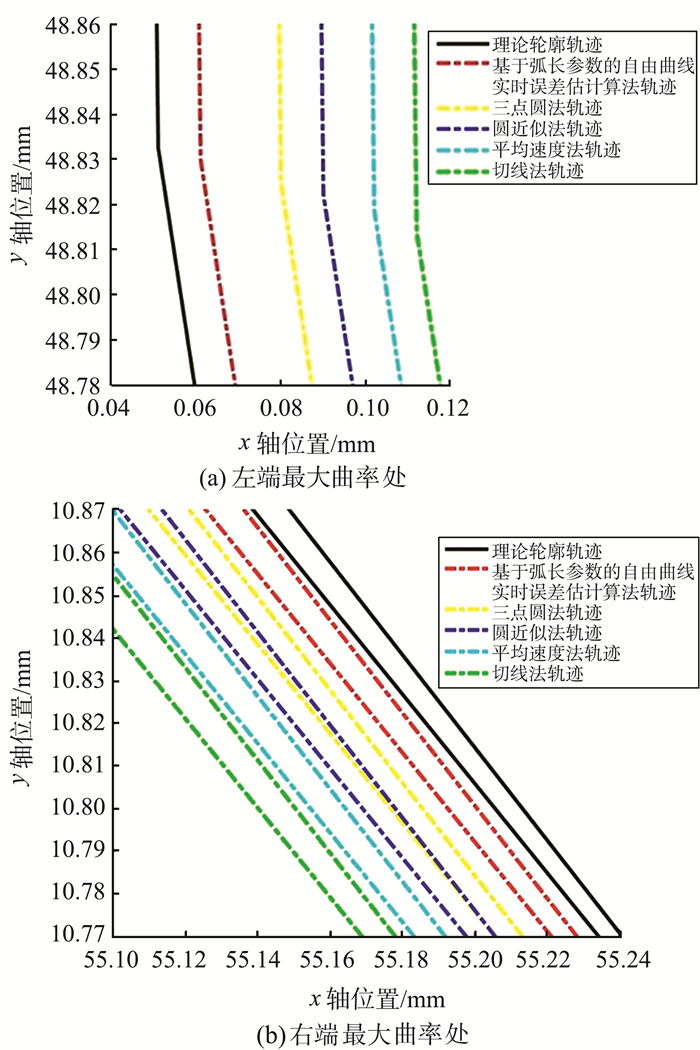
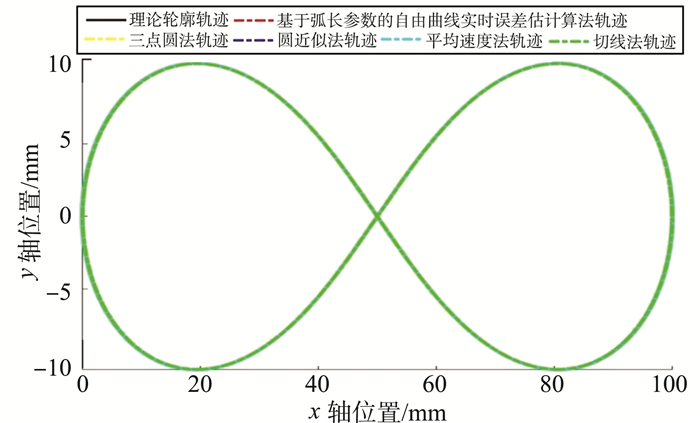
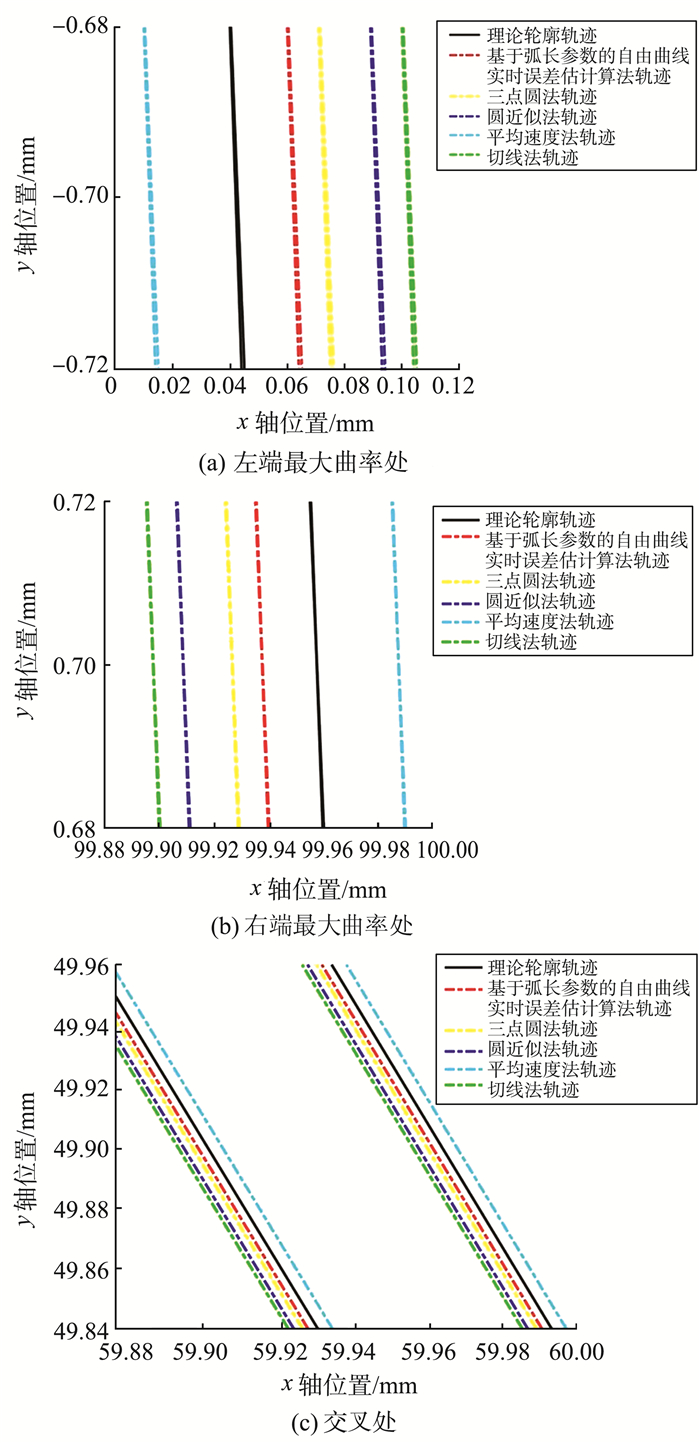
针对复杂型面零件加工精度要求提高以及在自由曲线跟随任务中实时精确计算轮廓误差难度较大等问题,提出一种基于弧长参数的自由曲线实时误差估计算法。在MATLAB/Simulink中利用非均匀有理B样条(non-uniform rational B-spline, NURBS)插补对椭圆轨迹和双纽线轨迹进行规划,将基于弧长参数的自由曲线实时误差估计算法与切线法、圆近似法、平均速度法和三点圆法的轮廓误差估算精度与执行时间等性能评价指标进行对比分析。仿真试验结果表明,基于弧长参数的自由曲线实时误差估计算法较现有常用的轮廓误差估计算法具有更好的轮廓误差估算精度,并且适用于大曲率自由曲线的情况。利用该方法可以更进一步设计出先进的交叉耦合控制(cross-coupled control, CCC)运动控制方案。
中图分类号:
| 1 |
KOREN Y . Cross-coupled biaxial computer control for manufacturing systems[J]. Journal of Dynamic Systems, Measurement, and Control, 1980, 102 (4): 265- 272.
doi: 10.1115/1.3149612 |
| 2 |
KOREN Y , LO C C . Variable-gain cross-coupling controller for contouring[J]. CIRP Annals, 1991, 40 (1): 371- 374.
doi: 10.1016/S0007-8506(07)62009-5 |
| 3 |
CHUANG H , LIU C . Cross-coupled adaptive feed rate control for multi axis machine tools[J]. Journal of Dynamic Systems, Measurement, and Control, 1991, 113 (3): 451- 457.
doi: 10.1115/1.2896431 |
| 4 |
TARNG Y S , CHUANG H Y , HSU W T . An optimization approach to the contour error control of CNC machine tools using genetic algorithms[J]. The International Journal of Advanced Manufacturing Technology, 1997, 13 (5): 359- 366.
doi: 10.1007/BF01178256 |
| 5 | YEH S S, HSU P L. A new approach to bi-axial cross-coupled control[C]//Proceedings of the 2000 IEEE International Conference on Control Applications. Anchorage, AK, USA: IEEE, 2000: 168-173. |
| 6 |
YEH S S , HSU P L . Adaptive-feedrate interpolation for parametric curves with a confined chord error[J]. Computer-Aided Design, 2002, 34 (3): 229- 237.
doi: 10.1016/S0010-4485(01)00082-3 |
| 7 |
CHEN S L , LIU H L , TING S C . Contouring control of biaxial systems based on polar coordinates[J]. IEEE/ASME Transactions on Mechatronics, 2002, 7 (3): 329- 345.
doi: 10.1109/TMECH.2002.802723 |
| 8 |
ERKORKMAZ K , YEUNG C H , ALTINTAS Y . Virtual CNC system: Part Ⅱ: High speed contouring application[J]. International Journal of Machine Tools and Manufacture, 2006, 46 (10): 1124- 1138.
doi: 10.1016/j.ijmachtools.2005.08.001 |
| 9 |
CHENG M Y , LEE C C . Motion controller design for contour-following tasks based on real-time contour error estimation[J]. IEEE Transactions on Industrial Electronics, 2007, 54 (3): 1686- 1695.
doi: 10.1109/TIE.2007.894691 |
| 10 |
CHEN S L , WU K C . Contouring control of smooth paths for multiaxis motion systems based on equivalent errors[J]. IEEE Transactions on Control Systems Technology, 2007, 15 (6): 1151- 1158.
doi: 10.1109/TCST.2007.899719 |
| 11 | YANG J , LI Z . A novel contour error estimation for position loop-based cross-coupled control[J]. IEEE/ASME Transactions on Mechatronics, 2010, 16 (4): 643- 655. |
| 12 |
ZHU L M , ZHAO H , DING H . Real-time contouring error estimation for multi-axis motion systems using the second-order approximation[J]. International Journal of Machine Tools and Manufacture, 2013, 68, 75- 80.
doi: 10.1016/j.ijmachtools.2013.01.008 |
| 13 | ZHAO G , AN H , ZHAO Q . Contour error coupled-control strategy based on line interpolation and curve interpolation[J]. Journal of Computers, 2013, 8 (6): 1512- 1519. |
| 14 | 徐赫楠. 数控机床进给伺服系统轮廓控制方法研究[D]. 天津: 天津大学, 2017. |
| XU Henan. Research on contour control for feeding servo system of CNC machine tools[D]. Tianjin: Tianjin University, 2017. | |
| 15 | LI B , WANG T Y , WANG P . Cross-coupled control based on real-time double circle contour error estimation for biaxial motion system[J]. Measurement and Control, 2021, 54 (3/4): 324- 335. |
| 16 | LYU D , LIU Q , LIU H , et al. Dynamic error of CNC machine tools: a state-of-the-art review[J]. The International Journal of Advanced Manufacturing Technology, 2020, 106, 1869- 1891. |
| 17 |
CHEN H R , CHENG M Y , WU C H , et al. Real time parameter based contour error estimation algorithms for free form contour following[J]. International Journal of Machine Tools and Manufacture, 2016, 102, 1- 8.
doi: 10.1016/j.ijmachtools.2015.11.009 |
| 18 |
PIEGL L . On NURBS: a survey[J]. IEEE Computer Graphics and Applications, 1991, 11 (1): 55- 71.
doi: 10.1109/38.67702 |
| 19 | 路勇良, 赵军, 李莉莉, 等. 一种进给伺服系统非线性PID交叉耦合控制[J/OL]. 机床与液压. (2022-09-22)[2023-01-03]. https://kns.cnki.net/kcms/detail/44.1259.th.20220919.1854.004.html. |
| 20 |
WANG T Y , ZHANG Y B , DONG J C , et al. NURBS interpolator with adaptive smooth feed rate scheduling and minimal feed rate fluctuation[J]. International Journal of Precision Engineering and Manufacturing, 2020, 21 (2): 273- 290.
doi: 10.1007/s12541-019-00288-6 |
| 21 | 吴彩成. 面向双轴数控加工系统的交叉耦合轮廓误差补偿综合控制策略研究[D]. 广州: 华南理工大学, 2021. |
| WU Caicheng. Research on comprehensive control strategy of cross-coupling contour error compensation for two-axis CNC machining system[D]. Guangzhou: South China University of Technology, 2021. |
| [1] | 刘迪,纪建奕,孙建英,江京亮,高玉飞. 重型车桥十字轴-齿轮转动副传动特性[J]. 山东大学学报 (工学版), 2024, 54(6): 182-190. |
| [2] | 许明三,王涛,李剑峰,戴腾运. 40Cr曲面基体激光熔覆W6Mo5Cr4V2性能[J]. 山东大学学报(工学版), 2018, 48(1): 57-64. |
| [3] | 刘彬,张仁津. 基于退火遗传算法的NURBS曲线逼近[J]. 山东大学学报(工学版), 2010, 40(5): 96-100. |
|